社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
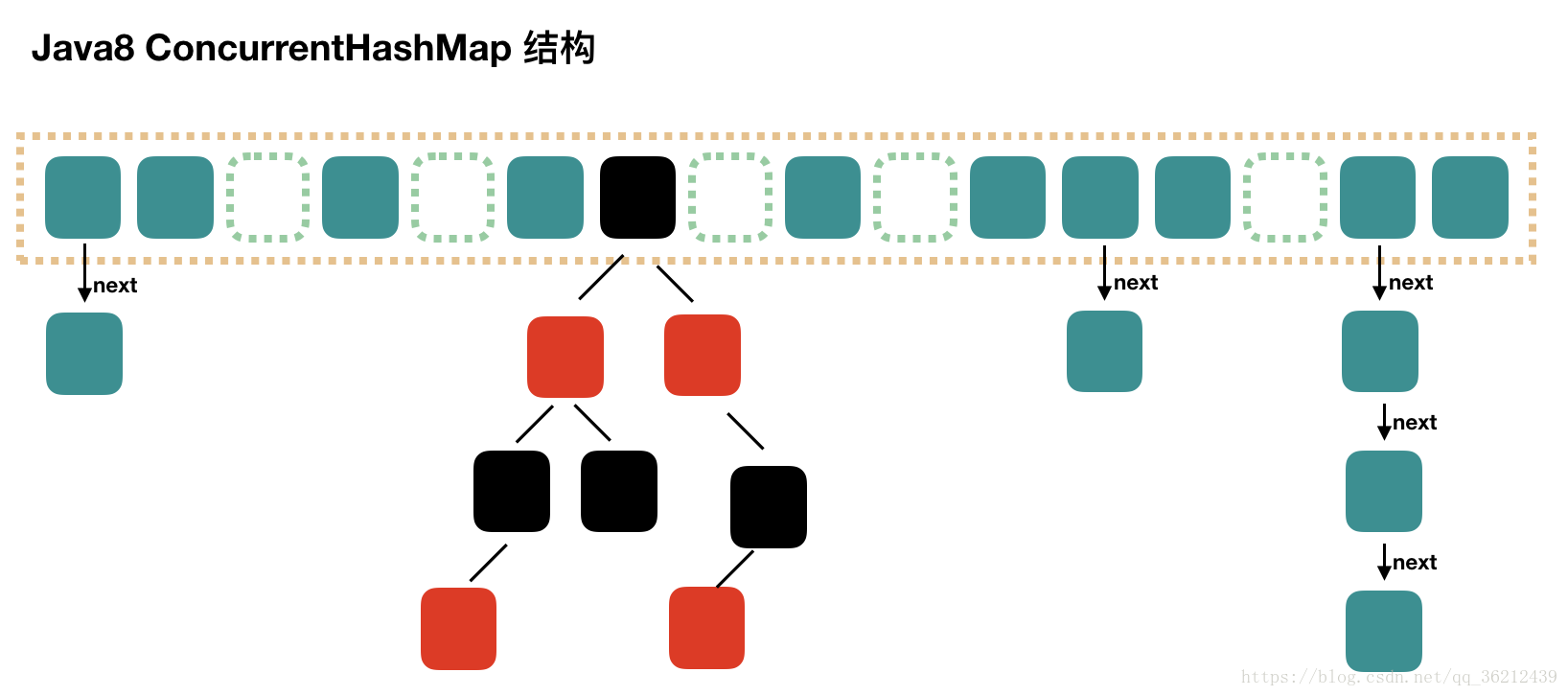
Java7 中实现的 ConcurrentHashMap 说实话还是比较复杂的,Java8 对 ConcurrentHashMap 进行了比较大的改动。建议可以参考 Java8 中 HashMap 相对于 Java7 HashMap 的改动,对于 ConcurrentHashMap,Java8 也引入了红黑树。Java8 ConcurrentHashMap 源码不简单,最难的在于扩容,数据迁移操作不容易看懂。
http://www.importnew.com/28263.html --HashMap在Java7和8的实现方式
HashMap 线程不安全的典型表现
HashMap是一个数组链表,当一个key/Value对被加入时,首先会通过Hash算法定位出这个键值对要被放入的桶,然后就把它插到相应桶中。如果这个桶中已经有元素了,那么发生了碰撞,这样会在这个桶中形成一个链表。一般来说,当有数据要插入HashMap时,都会检查容量有没有超过设定的thredhold,如果超过,需要增大HashMap的尺寸,但是这样一来,就需要对整个HashMap里的节点进行重哈希操作。HashMap在并发环境下使用中最为典型的一个问题,就是在HashMap进行扩容重哈希时导致Entry链形成环。一旦Entry链中有环,势必会导致在同一个桶中进行插入、查询、删除等操作时陷入死循环所以HashMap是线程不安全的。
另一个键值存储集合HashTable,它是线程安全的,它在所有涉及到多线程操作的都加上了synchronized关键字来锁住整个table,这就意味着所有的线程都在竞争一把锁,在多线程的环境下,它是安全的,但是无疑是效率低下的。
Java7 ConcurrentHashMap
在ConcurrentHashMap中,无论是读操作还是写操作都能保证很高的性能:在进行读操作时(几乎)不需要加锁,而在写操作时通过锁分段技术只对所操作的段加锁而不影响客户端对其它段的访问。特别地,在理想状态下,ConcurrentHashMap 可以支持 16 个线程执行并发写操作(如果并发级别设为16),及任意数量线程的读操作。
ConcurrentHashMap本质上是一个Segment数组,而一个Segment实例又包含若干个桶,每个桶中都包含一条由若干个 HashEntry 对象链接起来的链表。总的来说,ConcurrentHashMap的高效并发机制是通过以下三方面来保证的(具体细节见后文阐述)
ConcurrentHashMap类中包含两个静态内部类 HashEntry 和 Segment,其中 HashEntry 用来封装具体的K/V对,是个典型的四元组;Segment 用来充当锁的角色,每个 Segment 对象守护整个ConcurrentHashMap的若干个桶 (可以把Segment看作是一个小型的哈希表),其中每个桶是由若干个 HashEntry 对象链接起来的链表。
ConcurrentHashMap类在jdk1.7中的设计,其基本结构如图所示:
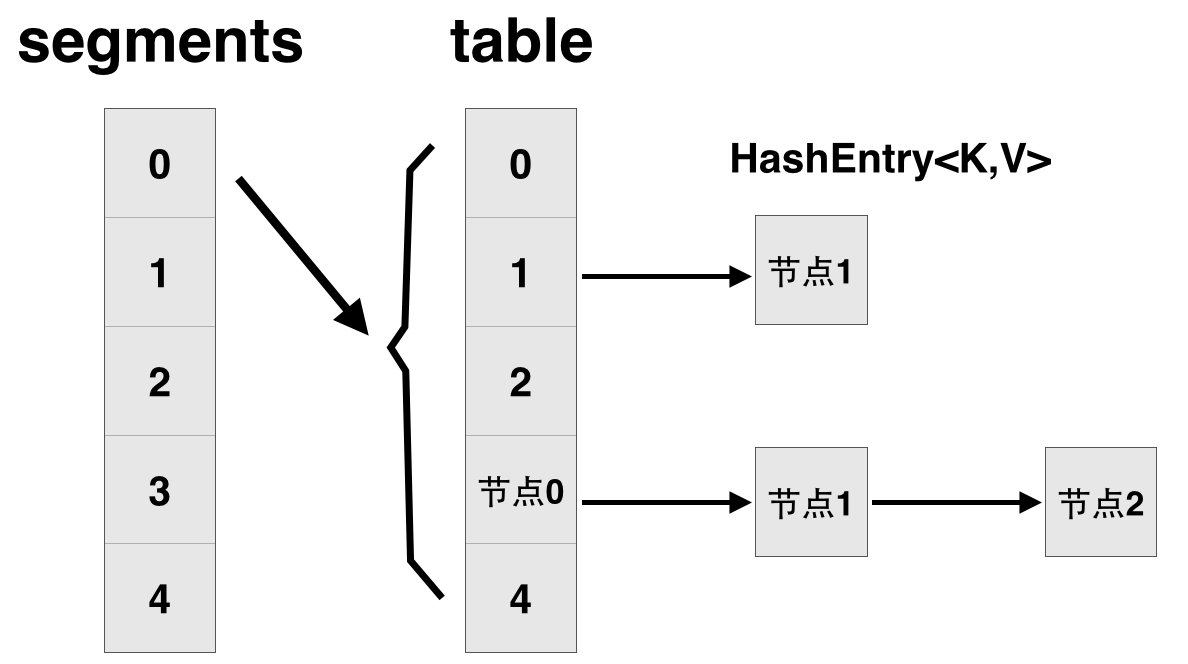
每一个segment都是一个HashEntry<K,V>[] table, table中的每一个元素本质上都是一个HashEntry的单向队列。比如table[3]为首节点,table[3]->next为节点1,之后为节点2,依次类推。
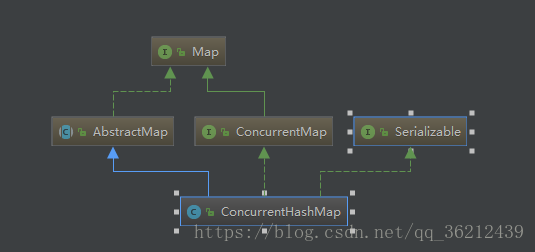
public class ConcurrentHashMap<K, V> extends AbstractMap<K, V>
implements ConcurrentMap<K, V>, Serializable {
// 将整个hashmap分成几个小的map,每个segment都是一个锁;与hashtable相比,这么设计的目的是对于put, remove等操作,可以减少并发冲突,对
// 不属于同一个片段的节点可以并发操作,大大提高了性能
final Segment<K,V>[] segments;
// 本质上Segment类就是一个小的hashmap,里面table数组存储了各个节点的数据,继承了ReentrantLock, 可以作为互拆锁使用
static final class Segment<K,V> extends ReentrantLock implements Serializable {
transient volatile HashEntry<K,V>[] table;
transient int count;
}
// 基本节点,存储Key, Value值
static final class HashEntry<K,V> {
final int hash;
final K key;
volatile V value;
volatile HashEntry<K,V> next;
}
}
Java8 ConcurrentHashMap
改进一:取消segments字段,直接采用transient volatile HashEntry<K,V>[] table保存数据,采用table数组元素作为锁,从而实现了对每一行数据进行加锁,进一步减少并发冲突的概率。
改进二:将原先table数组+单向链表的数据结构,变更为table数组+单向链表+红黑树的结构。对于hash表来说,最核心的能力在于将key hash之后能均匀的分布在数组中。如果hash之后散列的很均匀,那么table数组中的每个队列长度主要为0或者1。但实际情况并非总是如此理想,虽然ConcurrentHashMap类默认的加载因子为0.75,但是在数据量过大或者运气不佳的情况下,还是会存在一些队列长度过长的情况,如果还是采用单向列表方式,那么查询某个节点的时间复杂度为O(n);因此,对于个数超过8(默认值)的列表,jdk1.8中采用了红黑树的结构,那么查询的时间复杂度可以降低到O(logN),可以改进性能。
Java8 ConcurrentHasnMap源码分析
类信息:
public class ConcurrentHashMap<K,V> extends AbstractMap<K,V> implements ConcurrentMap<K,V>, Serializable
重要概念
static class Node<K, V> implements Entry<K, V> {
final int hash;
final K key;
volatile V val;
volatile ConcurrentHashMap.Node<K, V> next;
Node(int var1, K var2, V var3, ConcurrentHashMap.Node<K, V> var4) {
this.hash = var1;
this.key = var2;
this.val = var3;
this.next = var4;
}
其中value和next都用volatile修饰,保证并发的可见性
static final class ForwardingNode<K, V> extends ConcurrentHashMap.Node<K, V> {
final ConcurrentHashMap.Node<K, V>[] nextTable;
ForwardingNode(ConcurrentHashMap.Node<K, V>[] var1) {
super(-1, (Object)null, (Object)null, (ConcurrentHashMap.Node)null);
this.nextTable = var1;
}
ConcurrentHashMap.Node<K, V> find(int var1, Object var2) {
ConcurrentHashMap.Node[] var3 = this.nextTable;
。
。
。
}
只有table发生扩容的时候,ForwardingNode才会发挥作用,作为一个占位符放在table中表示当前节点为null或则已经被移动。
初始化
实例化ConcurrentHashMap时带参数时,会根据参数调整table的大小,假设参数为100,最终会调整成256,确保table的大小总是2的幂次方,算法如下:
ConcurrentHashMap<String, String> hashMap = new ConcurrentHashMap<>(100);
public ConcurrentHashMap(int var1) {
if (var1 < 0) {
throw new IllegalArgumentException();
} else {
int var2 = var1 >= 536870912 ? 1073741824 : tableSizeFor(var1 + (var1 >>> 1) + 1);
this.sizeCtl = var2;
}
}
private static final int tableSizeFor(int var0) {
int var1 = var0 - 1;
var1 |= var1 >>> 1;
var1 |= var1 >>> 2;
var1 |= var1 >>> 4;
var1 |= var1 >>> 8;
var1 |= var1 >>> 16;
return var1 < 0 ? 1 : (var1 >= 1073741824 ? 1073741824 : var1 + 1);
}
注意,ConcurrentHashMap在构造函数中只会初始化sizeCtl值,并不会直接初始化table,而是延缓到第一次put操作。
table初始化
前面已经提到过,table初始化操作会延缓到第一次put行为。但是put是可以并发执行的,Doug Lea是如何实现table只初始化一次的?让我们来看看源码的实现。
private final ConcurrentHashMap.Node<K, V>[] initTable() {
ConcurrentHashMap.Node[] var1;
while(true) {
var1 = this.table;
if (this.table != null && var1.length != 0) {
break;
}
int var2 = this.sizeCtl;
if (this.sizeCtl < 0) {
//如果一个线程发现sizeCtl<0,意味着另外的线程执行CAS操作成功,当前线程只需要让出cpu时间片
Thread.yield();
} else if (U.compareAndSwapInt(this, SIZECTL, var2, -1)) {
try {
var1 = this.table;
if (this.table == null || var1.length == 0) {
int var3 = var2 > 0 ? var2 : 16;
ConcurrentHashMap.Node[] var4 = (ConcurrentHashMap.Node[])(new ConcurrentHashMap.Node[var3]);
var1 = var4;
this.table = var4;
var2 = var3 - (var3 >>> 2);
}
break;
} finally {
this.sizeCtl = var2;
}
}
}
return var1;
}
put操作
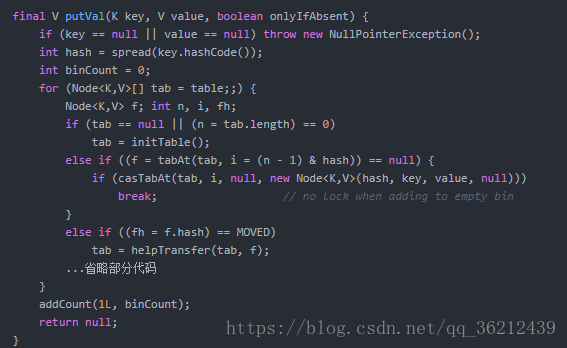
若table已经初始化完成,put操作采用CAS+synchronized实现并发插入或更新操作,具体实现如下:
1.hash算法
static final int spread(int var0) {
return (var0 ^ var0 >>> 16) & 2147483647;
}
2.table中定位索引位置,n是table的大小
int index = (n - 1) & hash
3.获取table中对应索引的元素f。
Doug Lea采用Unsafe.getObjectVolatile来获取,也许有人质疑,直接table[index]不可以么,为什么要这么复杂?
在java内存模型中,我们已经知道每个线程都有一个工作内存,里面存储着table的副本,虽然table是volatile修饰的,但不能保证线程每次都拿到table中的最新元素,Unsafe.getObjectVolatile可以直接获取指定内存的数据,保证了每次拿到数据都是最新的。
synchronized (f) {
if (tabAt(tab, i) == f) {
if (fh >= 0) {
binCount = 1;
for (Node<K,V> e = f;; ++binCount) {
K ek;
if (e.hash == hash &&
((ek = e.key) == key ||
(ek != null && key.equals(ek)))) {
oldVal = e.val;
if (!onlyIfAbsent)
e.val = value;
break;
}
Node<K,V> pred = e;
if ((e = e.next) == null) {
pred.next = new Node<K,V>(hash, key,
value, null);
break;
}
}
}
else if (f instanceof TreeBin) {
Node<K,V> p;
binCount = 2;
if ((p = ((TreeBin<K,V>)f).putTreeVal(hash, key,
value)) != null) {
oldVal = p.val;
if (!onlyIfAbsent)
p.val = value;
}
}
}
}
在节点f上进行同步,节点插入之前,再次利用tabAt(tab, i) == f判断,防止被其它线程修改。
table扩容
当table容量不足的时候,即table的元素数量达到容量阈值sizeCtl,需要对table进行扩容。
整个扩容分为两部分:
这两个过程在单线程下实现很简单,但是ConcurrentHashMap是支持并发插入的,扩容操作自然也会有并发的出现,这种情况下,第二步可以支持节点的并发复制,这样性能自然提升不少,但实现的复杂度也上升了一个台阶。
先看第一步,构建nextTable,毫无疑问,这个过程只能只有单个线程进行nextTable的初始化,具体实现如下:
private final void addCount(long x, int check) {
... 省略部分代码
if (check >= 0) {
Node<K,V>[] tab, nt; int n, sc;
while (s >= (long)(sc = sizeCtl) && (tab = table) != null &&
(n = tab.length) < MAXIMUM_CAPACITY) {
int rs = resizeStamp(n);
if (sc < 0) {
if ((sc >>> RESIZE_STAMP_SHIFT) != rs || sc == rs + 1 ||
sc == rs + MAX_RESIZERS || (nt = nextTable) == null ||
transferIndex <= 0)
break;
if (U.compareAndSwapInt(this, SIZECTL, sc, sc + 1))
transfer(tab, nt);
}
else if (U.compareAndSwapInt(this, SIZECTL, sc,
(rs << RESIZE_STAMP_SHIFT) + 2))
transfer(tab, null);
s = sumCount();
}
}
}
通过Unsafe.compareAndSwapInt修改sizeCtl值,保证只有一个线程能够初始化nextTable,扩容后的数组长度为原来的两倍,但是容量是原来的1.5。
节点从table移动到nextTable,大体思想是遍历、复制的过程。
遍历过所有的节点以后就完成了复制工作,把table指向nextTable,并更新sizeCtl为新数组大小的0.75倍 ,扩容完成。
红黑树构造
注意:如果链表结构中元素超过TREEIFY_THRESHOLD阈值,默认为8个,则把链表转化为红黑树,提高遍历查询效率。
if (binCount != 0) {
if (binCount >= TREEIFY_THRESHOLD)
treeifyBin(tab, i);
if (oldVal != null)
return oldVal;
break;
}
接下来我们看看如何构造树结构,代码如下:
private final void treeifyBin(Node<K,V>[] tab, int index) {
Node<K,V> b; int n, sc;
if (tab != null) {
if ((n = tab.length) < MIN_TREEIFY_CAPACITY)
tryPresize(n << 1);
else if ((b = tabAt(tab, index)) != null && b.hash >= 0) {
synchronized (b) {
if (tabAt(tab, index) == b) {
TreeNode<K,V> hd = null, tl = null;
for (Node<K,V> e = b; e != null; e = e.next) {
TreeNode<K,V> p =
new TreeNode<K,V>(e.hash, e.key, e.val,
null, null);
if ((p.prev = tl) == null)
hd = p;
else
tl.next = p;
tl = p;
}
setTabAt(tab, index, new TreeBin<K,V>(hd));
}
}
}
}
}
可以看出,生成树节点的代码块是同步的,进入同步代码块之后,再次验证table中index位置元素是否被修改过。
1、根据table中index位置Node链表,重新生成一个hd为头结点的TreeNode链表。
2、根据hd头结点,生成TreeBin树结构,并把树结构的root节点写到table的index位置的内存中,具体实现如下:
TreeBin(TreeNode<K,V> b) {
super(TREEBIN, null, null, null);
this.first = b;
TreeNode<K,V> r = null;
for (TreeNode<K,V> x = b, next; x != null; x = next) {
next = (TreeNode<K,V>)x.next;
x.left = x.right = null;
if (r == null) {
x.parent = null;
x.red = false;
r = x;
}
else {
K k = x.key;
int h = x.hash;
Class<?> kc = null;
for (TreeNode<K,V> p = r;;) {
int dir, ph;
K pk = p.key;
if ((ph = p.hash) > h)
dir = -1;
else if (ph < h)
dir = 1;
else if ((kc == null &&
(kc = comparableClassFor(k)) == null) ||
(dir = compareComparables(kc, k, pk)) == 0)
dir = tieBreakOrder(k, pk);
TreeNode<K,V> xp = p;
if ((p = (dir <= 0) ? p.left : p.right) == null) {
x.parent = xp;
if (dir <= 0)
xp.left = x;
else
xp.right = x;
r = balanceInsertion(r, x);
break;
}
}
}
}
this.root = r;
assert checkInvariants(root);
}
主要根据Node节点的hash值大小构建二叉树。这个红黑树的构造过程实在有点复杂,感兴趣的可以看看源码。
get操作
get操作和put操作相比,显得简单了许多。
public V get(Object key) {
Node<K,V>[] tab; Node<K,V> e, p; int n, eh; K ek;
int h = spread(key.hashCode());
if ((tab = table) != null && (n = tab.length) > 0 &&
(e = tabAt(tab, (n - 1) & h)) != null) {
if ((eh = e.hash) == h) {
if ((ek = e.key) == key || (ek != null && key.equals(ek)))
return e.val;
}
else if (eh < 0)
return (p = e.find(h, key)) != null ? p.val : null;
while ((e = e.next) != null) {
if (e.hash == h &&
((ek = e.key) == key || (ek != null && key.equals(ek))))
return e.val;
}
}
return null;
}
总结
ConcurrentHashMap 是一个并发散列映射表的实现,它允许完全并发的读取,并且支持给定数量的并发更新。相比于 HashTable 和同步包装器包装的 HashMap,使用一个全局的锁来同步不同线程间的并发访问,同一时间点,只能有一个线程持有锁,也就是说在同一时间点,只能有一个线程能访问容器,这虽然保证多线程间的安全并发访问,但同时也导致对容器的访问变成串行化的了。
1.6中采用ReentrantLock 分段锁的方式,使多个线程在不同的segment上进行写操作不会发现阻塞行为;1.8中直接采用了内置锁synchronized,可能是因为1.8的虚拟机对内置锁已经优化的足够快了。
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!