社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'wget http://packages.ros.org/ros.key -O - | sudo apt-key add -sudo apt-get update sudo apt-get install ros-indigo-desktop-full等安装完成运行:
sudo rosdep init
rosdep update echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc tar zxvf linux-4.4.32-apollo-1.5.0.tar.gz
cd install
sudo ./install_kernel.sh完成后重启进入新内核
https://github.com/ApolloAuto/apollo-platform/releases/download/1.5.1/ros-indigo-apollo-1.5.1-x86_64.tar.gzrsync -av ros/ ~/apollo/third_party/ros_x86_64
cd apollo目录下执行:
source ./third_party/ros_x86_64/setup.bash至此,apollo部署完毕,接下来进行测试。
git clone https://github.com/ApolloAuto/apollo.gitcd ~/apollo
bash docker/scripts/install_docker.sh先注销再重新登录,然后测试一下docker是否安装成功:
docker psbash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.shbash apollo.sh build(如果没有进入docker环境,先进入docker)
cd ~/apollo
bash docker/scripts/dev_start.sh
bash docker/scripts/dev_into.sh
source ./third_party/ros_x86_64/setup.bash //执行后可以在docker下使用ros
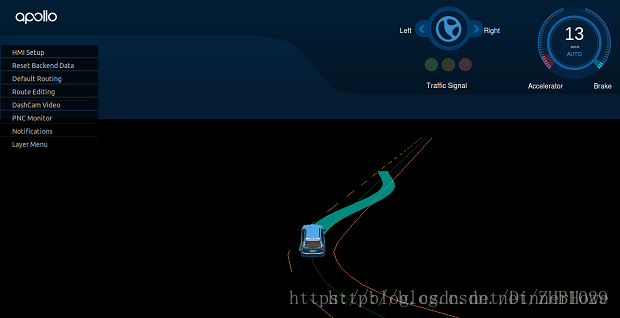
sh scripts/hmi.sh //进入交互环境在浏览器输入http://localhost:8887后回车,出现以下界面开启Dreamview,然后点击右上方的Dreamview。
新开一个终端里输入:
rosbag play -l ./docs/demo_guide/demo.bag然后就可以看到界面播放demo.bag数据啦:
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!