社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
opencv中有逼近多边形曲线的函数approxPolyDP,但是不能一直做一个调包侠,因此我用opencv实现了一篇论文中介绍的两种多边形拟合算法。论文名称:《图像处理中多边形拟合的快速算法》,作者:张帆等,点此下载。在写代码之前,首先要了解两个简单的数学知识。
1、已知两个点的坐标,
,如何确定直线方程
中a、b、c的数值?
整理上式得:
因此:
,
,
2、点到直线的距离公式:
该论文中作者提出的多边形拟合算法,我用opencv实现以后发现找到的边缘并不是目标真实的边缘(本人能力水平有限,可能并没有理解作者的真正思想)。因此我对其算法步骤进行了修改,将第六步中的阈值T变为一个比T小的数值,得到下图所示结果。根据结果图可以看出,还是opencv官方的算法效果比较好,不仅速度快而且精度高。其它两种算法速度较慢,且得到的轮廓有些许变形。
效果图:
原图


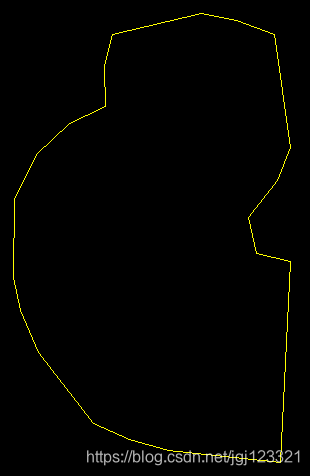
opencv自带方法 迭代端点拟合法 多边形拟合法
代码:
/////////////////////////
//opencv4.1.0
/////////////////////////
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace cv;
using namespace std;
Mat src, binary, src_gray;
TickMeter tm;
/***** Opencv自带方法*****/
void OpencvFitting(vector<vector<Point>>& contours);
/***** 迭代端点拟合法*****/
float T = 0.9; //距离阈值
int step = 20; //步长
vector<Point>ResultContours;
void IterativeEndpointFitting(vector<vector<Point>>& contours);
void fun(int top, int sum, int j, vector<vector<Point>>& contours);
float getDist_P2L(Point pointP, Point pointA, Point pointB);
/***** 多边形拟合法*****/
void PolygonFitting(vector<vector<Point>>& contours);
int main(int argc,char** argv )
{
//读取图片
src = imread("3.jpg");
if (src.empty()){
printf("读取图像失败n");
return -1;
}
imshow("输入图片",src);
//二值化
cvtColor(src,src_gray,COLOR_BGR2GRAY);
threshold(src_gray,binary,0,255,THRESH_BINARY|THRESH_OTSU);
//寻找轮廓,并获取坐标点集
vector<Vec4i>hireachy;
vector<vector<Point>> contours;
findContours(binary,contours,hireachy,RETR_TREE,CHAIN_APPROX_NONE,Point());
//Opencv自带方法
tm.start();
OpencvFitting(contours);
tm.stop();
cout << "Opencv自带方法运行时间:" << tm.getTimeMilli() << endl;
//迭代端点拟合法
tm.start();
IterativeEndpointFitting(contours);
tm.stop();
cout << "迭代端点拟合法运行时间:" << tm.getTimeMilli() << endl;
//多边形拟合法
tm.start();
PolygonFitting(contours);
tm.stop();
cout << "多边形拟合法运行时间:" << tm.getTimeMilli() << endl;
waitKey(0);
return 0;
}
void OpencvFitting(vector<vector<Point>>& contours) {
//逼近多边形曲线
vector<vector<Point>> poly(contours.size());
for (size_t t = 0; t<contours.size();t++){
approxPolyDP(contours[t], poly[t], 5, true);
}
//画出轮廓
Mat OpencvResult = Mat::zeros(src_gray.size(), CV_8UC3);
for (size_t t = 0; t<contours.size();t++){
drawContours(OpencvResult, poly, t, Scalar(0, 255, 255), 1, 8, Mat(), 0, Point());
}
imshow(" OpencvResult", OpencvResult);
}
void IterativeEndpointFitting(vector<vector<Point>>& contours) {
for (int j = 0; j<contours[0].size() - 10; j = j + step)
{
fun(step, step, j,contours);
}
vector<vector<Point>> contours1;
contours1.push_back(ResultContours);//一维向量点集转换为二维向量点集:vector<Point> —— vector<vector<Point>>,否则drawContours函数崩溃
//画出轮廓
Mat MyResult = Mat::zeros(src_gray.size(), CV_8UC3);
for (size_t t = 0; t<contours1.size();t++)
{
drawContours(MyResult, contours1, t, Scalar(0, 255, 255), 1, 8, Mat(), 0, Point());
}
imshow(" 迭代端点拟合法", MyResult);
}
//top:在步长范围内,距离最大点的序号
//sum:参与计算的点的个数
//j: 步数*步长
void fun(int top, int sum, int j, vector<vector<Point>>& contours)
{
Point LeftE, RightE; //左右两侧点距离直线距离最大点的坐标
float LeftH = 0, RightH = 0; //左右两侧点距离直线距离最大值
int MaxValueIndexLeft, MaxValueIndexRight; //左右两侧点距离直线距离最大值对应的索引
for (int i = 0; i <= top;i++)
{
//左侧距离计算
float DistanceLeft = getDist_P2L(contours[0][i + j], contours[0][0 + j], contours[0][top + j]);
if (DistanceLeft>LeftH)
{
LeftH = DistanceLeft;
LeftE = contours[0][i + j];
MaxValueIndexLeft = i;
}
//右侧距离计算
if (sum != top && i <= (sum - top))
{
float DistanceRight = getDist_P2L(contours[0][i + j + top], contours[0][top + j], contours[0][sum + j]);
if (DistanceRight>RightH)
{
RightH = DistanceRight;
RightE = contours[0][i + j + top];
MaxValueIndexRight = i;
}
}
}
if (LeftH>T)
{
ResultContours.push_back(LeftE);
fun(MaxValueIndexLeft, top, j, contours);
}
if (RightH>T && sum != top)
{
ResultContours.push_back(RightE);
fun(MaxValueIndexRight, top, j, contours);
}
}
/***** 点P到直线AB的距离*****/
float getDist_P2L(Point pointP, Point pointA, Point pointB)
{
//求直线方程
int A = 0, B = 0, C = 0;
A = pointA.y - pointB.y;
B = pointB.x - pointA.x;
C = pointA.x*pointB.y - pointA.y*pointB.x;
//代入点到直线距离公式
float distance = 0;
distance = ((float)abs(A*pointP.x + B*pointP.y + C)) / ((float)sqrtf(A*A + B*B));
return distance;
}
void PolygonFitting(vector<vector<Point>>& contours) {
int T = 10;
Point E;
vector<Point>ResultContours;
for (int j = 0; j<contours[0].size() / (4 * T); j++) {
float H = 0;
for (int i = 2 * T + 4 * T*j; i <= 3 * T + 4 * T*j;i++) {
float Distance = getDist_P2L(contours[0][i], contours[0][0 + 4 * T*j], contours[0][4 * T + 4 * T*j]);
if (Distance>H) {
H = Distance;
E = contours[0][i];
}
}
if (H>1) { //按照论文中描述,此处应该是if(H>T),但我做了修改
ResultContours.push_back(E);
}
}
vector<vector<Point>> contours1;
contours1.push_back(ResultContours);//一维向量点集转换为二维向量点集:vector<Point> —— vector<vector<Point>>,否则drawContours函数崩溃
//画出轮廓
Mat MyResult = Mat::zeros(src_gray.size(), CV_8UC3);
for (size_t t = 0; t<contours1.size();t++)
{
drawContours(MyResult, contours1, t, Scalar(0, 255, 255), 1, 8, Mat(), 0, Point());
}
imshow(" 多边形拟合法", MyResult);
}
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
