社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
记忆力差的孩子得勤做笔记!
一、简单节点仿真
1. 运行fake_turtlebot节点:
$ roslaunch rbx1_bringup fake_turtlebot.launch2. 运行rbx1_nav仿真:
$ rosrun rviz rviz -d `rospack find rbx1_nav` /sim.rviz3. 发布一个topic,让机器人动起来:
$ rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{ linear:{x: 0.2, y: 0, z: 0 }, angular:{x: 0, y: 0, z: 0.5} }' 这里特别要注意,命令中冒号(:)后面要有一个空格,不然会报错。运行效果如下:
4. 让机器人停止运动:
首先,用ctrl+c结束掉上条命令的执行,然后运行:
$ rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{ }' 二、导航仿真
1. 运行fake_turtlebot节点
首先得用ctrl+c关闭先前运行的fake_turtlebot节点,然后运行:
$ roslaunch rbx1_bringup fake_turtlebot.launch
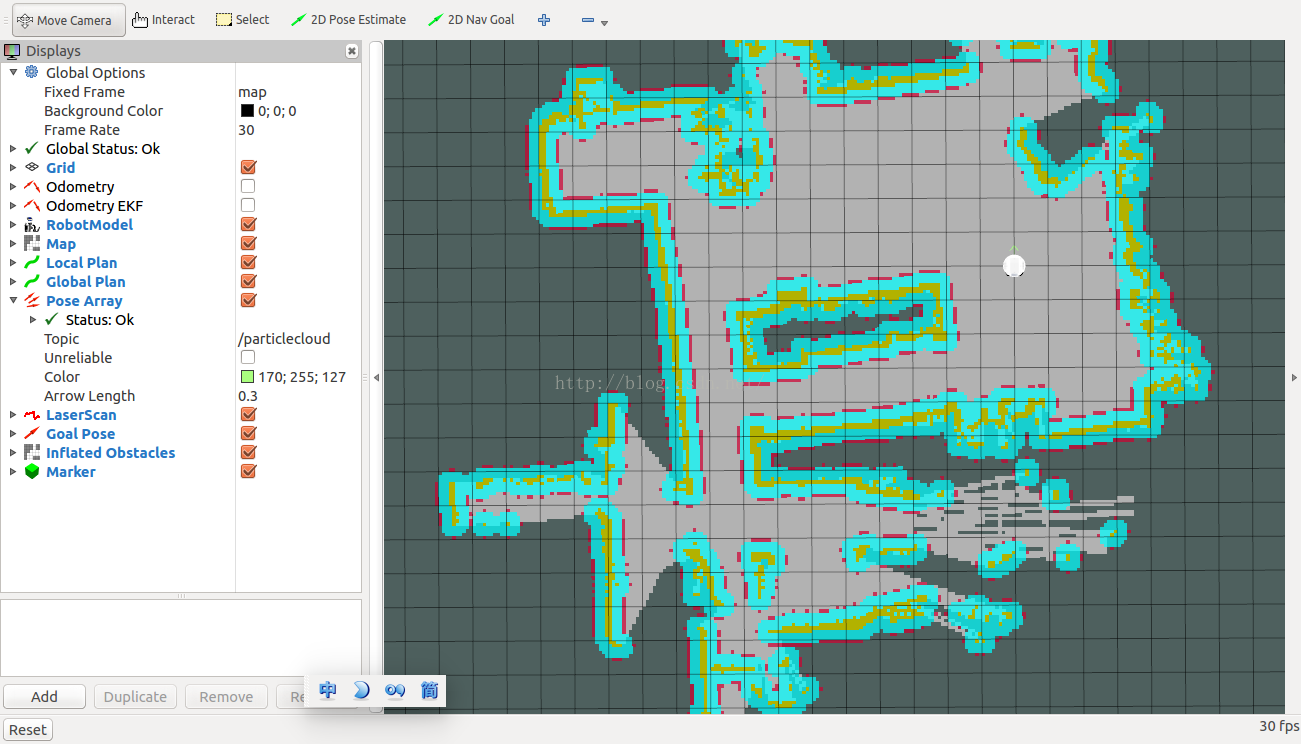
$ roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml
$ rosrun rviz rviz -d `rospack find rbx1_nav`/nav_test.rviz点击左上角2D Nav Goal,选择目标点,即可看到导航的仿真效果。到此,总结完毕!
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!