社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
前提已经安装配置好Ubuntu16.04+ROS kinetic
在命令行窗口(终端)中输入安装命令
sudo apt-get install ros-kinetic-turtlebot-*
rosdep update
rosdep install rviz
rosmake rviz
在一个终端中运行
roscore
重新打开一个命令行窗口
sudo apt-get install ros-kinetic-arbotix-*
cd ~/catkin_ws/src
git clone https://github.com/pirobot/rbx1.git
cd ..
catkin_make
一个终端中运行机器人节点:
roslaunch rbx1_bringup fake_turtlebot.launch
再一个终端测试地图运行amcl节点:
roslaunch rbx1_nav fake_amcl.launch map:=test_map.yaml
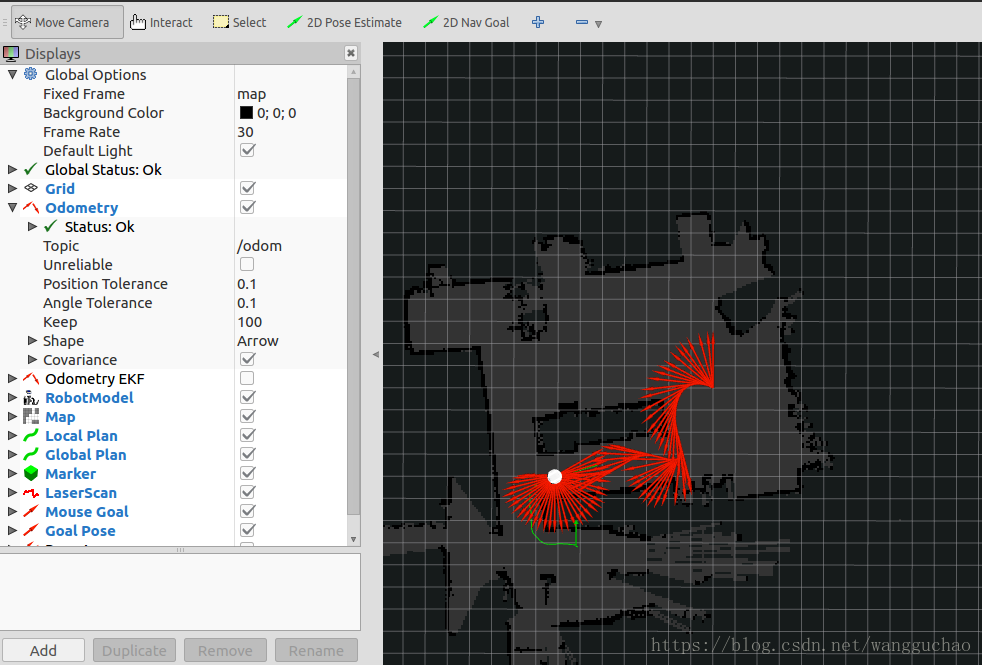
再一个终端运行rviz
rosrun rviz rviz -d `rospack find rbx1_nav`/nav.rviz
其中单击2D Pose Estimate,单击地图位置,选择机器人初始位置;点击2D Nav Goal ,点击地图,选择机器人目的位置。选择完成后机器人后自动走到目的位置。
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!