社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
视频传输: 在一台电脑上播放视频(捕捉摄像头画面),同局域网内另一台电脑上实时播放,尽量不卡顿。
先放最后的照片,和用gif展示一下视频效果。
图片或者流的形式,本文采取传输图片的形式,在1s之内显示多张图片从而形成连续的视频画面。Python的Socket,使用opencv捕捉摄像头/视频的画面。1920*1080*3),整图就算压缩成jpg格式其大小也非常大。而UDP最大只能传输65535字节大小的数据区,故对图片进行分块,分块过后的数据压缩成jpg格式,并对图片分块数据进行编号。数据片池。数据片池 读取数据片,根据数据片的编号更新幕布,这里幕布是专门用于图像显示的一个数组,其维度是720p(1920*1080*3)。更新过后的结果暂存于图片池图片池读取图片,并显示。为了实现低延迟,毫无疑问选取无连接的UDP传输。
这里其实也谈不上什么算法,就是将图片水平分割。这种做法的好处在于,分割后图片的编号可以和区域一一对应。
本文没有探索更为复杂的图片分片算法。
经过处理,图片变为一个个分片,如下:



对上述图片进行编号,很显然可以编号0,1,2,3,对于任意分块(例如2)在图像数组中对应的区域是frame[2*piece_size:(2+1)*piece_size],其中piece_size表示一片数据的大小。
这种对应关系方便解压后的图像还原操作。
这其实是个很小的技术点,因为使用的压缩算法都是现成的。但是值得一提的是,JPG的压缩率是真的高,在实验数据上实现了10-20倍的压缩率。
使用了多线程压缩,压缩完过后,更新对应的桶,这里的桶实际上就是数据片。
由主线程Main Thread反复从桶里取数据片(t1),每取1片发送一次,然后再取下一片(t2),直到所有桶都被取了一次(例子中有10片)。至此,一张图片的分片数据被全部取完,于是开始统计一些FPS相关信息。
接收端开了10个线程用于异步socket接收数据片。
为了保证接收端产生丝滑的视频效果,使用接收队列是个不错的选择。本文使用了2个队列的设计。实现数据接收的二级缓冲。
示意图如下:
这样一来,视频效果明显丝滑了很多。
巨坑,最好都关了。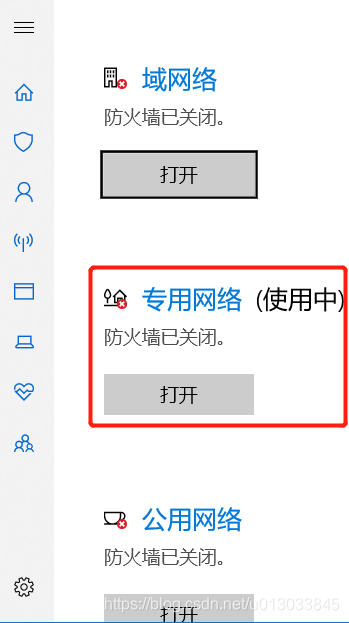
同一台路由器的5G和2.4G频段有时候不能互相ping通,要确保两个电脑连接在同一频段上。
如果上述设置都对了,但是还是ping不通。将wifi连接设置成专用网络,也许就能解决问题。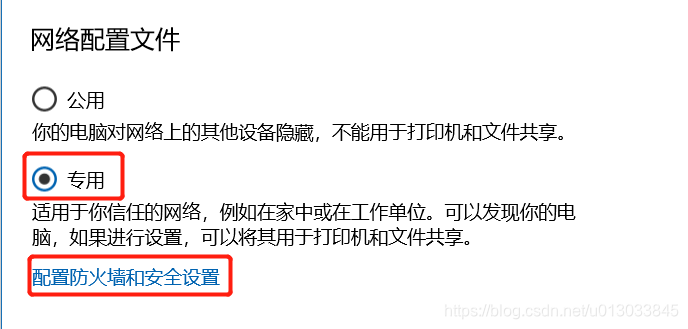
个人PC的性能是较大瓶颈,尤其是单机测验的时候(本地两个终端,一个发送、一个接收),CPU使用率分分钟到100%。听某个技术大哥说要使用GPU压缩。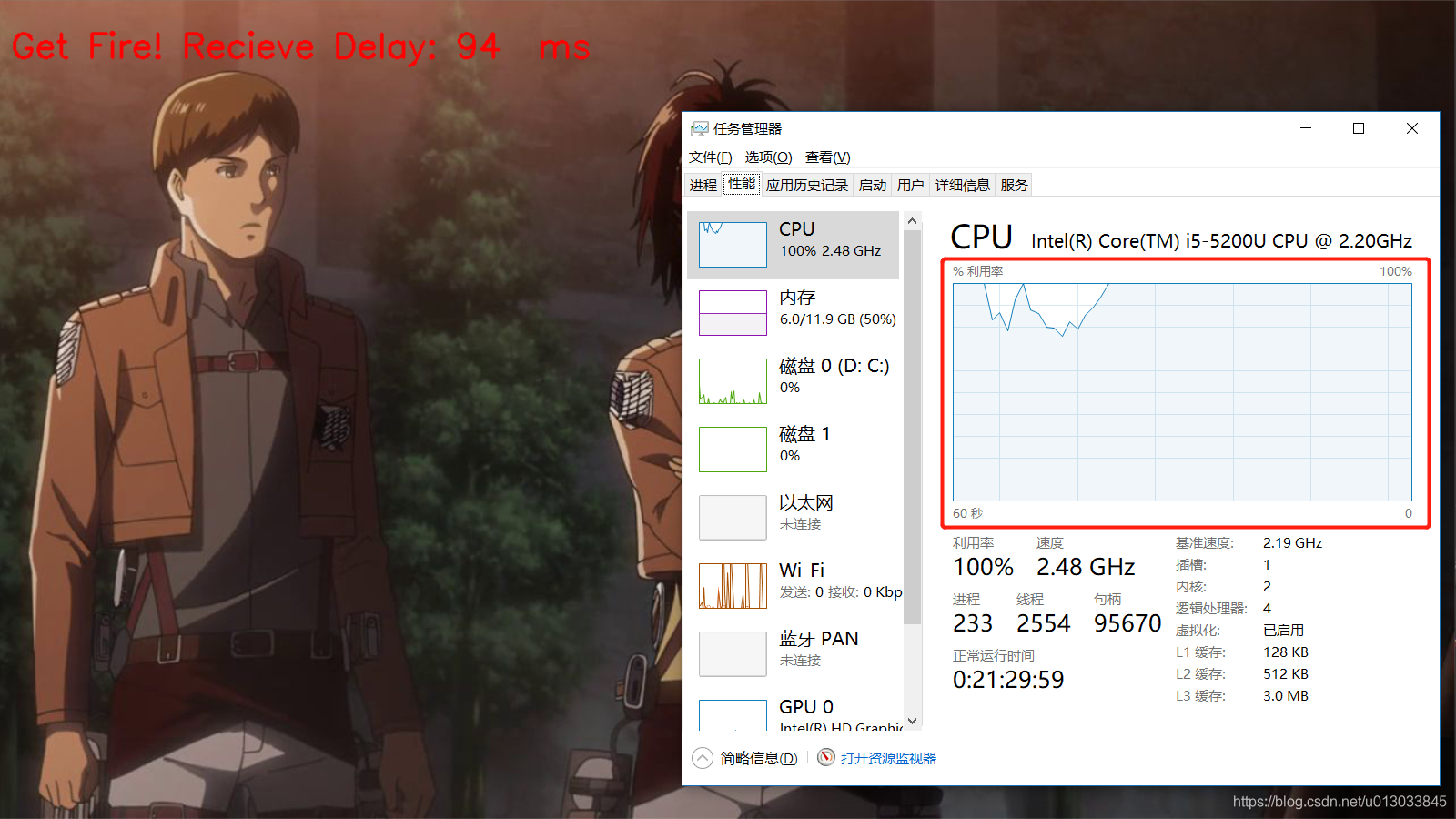
用两台电脑,一台接收一台发送之后,效果要好很多。
由于摄像头驱动的关系,在我的电脑上需要设置以下两个变量,才能成功启用外置的720p摄像头。
os.environ["OPENCV_VIDEOIO_DEBUG"] = "1"
os.environ["OPENCV_VIDEOIO_PRIORITY_MSMF"] = "0"
即使如此,如果不做额外的设置,读出来的图片将是480p的(看起来很像是720p被压缩过后的)。所以如果要传输真·720p,还需要设置读出的图像大小,如下:
self.stream = cv2.VideoCapture(1) # 读取第一个外置摄像头
self.stream.set(cv2.CAP_PROP_FRAME_WIDTH, 1280) # float
self.stream.set(cv2.CAP_PROP_FRAME_HEIGHT, 720) # float
不知道是不是我写的有问题,感觉多线程的socket会争抢资源(发送和接收的线程间,对应5.1节功能),造成接收端的画面显示将变得卡顿。
为了计算网络时延,采取类似伽利略测光速的方法。从数据包打包之前,到对方收到数据包之后,再将这个数据回传到发送方。这样就不存在两台机器时间差校准的问题。
该算法的大致流程如下图所示。
如上图,这样回传之后,设数据包时间戳是(单位,下同),当前时间是,则网络时延计算方式为:
这种计算方式应该是自己的实验环境下比较准确的方法了。
时延信息的反馈不需要特别快(比如200-500ms发送一次),所以使用TCP技术
其实TCP和UDP在使用Python编程的时候代码差距可以说极小…
但是!!!
socket之后,甚至还没传输数据,整个程序运行起来就变得非常卡顿,这个让我比较苦恼,目前正在找bug.这部分的思想是流量控制,感谢评论区指正。
5.1节如果一并回传接收端队列状态信息。如果接收端队列太满,说明来不及处理视频帧了,从而对发送端的发送速度进行控制,才是“拥塞控制”
这个本来是想着和5.1综合起来用的,已经写好了,但是还没能真正展现价值,设计是否合理也值得商榷。
控制的是发送端的发送频率,从而实现接收端的流畅播放
思想和TCP的拥塞控制一样慢增长,快下降。如果接收端的队列一直处于较空的状态,则表明还有一定的性能剩余,此时可以缓慢加快发送的频率;如果检测到接收端队列中数据较多,表明发送速度太快来不及显示,这时候就大幅下降发送的频率。
这个拥塞控制的算法基于几个假设:
如果5.1能够正确实现,则应该根据网络时延的大小来控制发送的频率。
这个项目是一周的时间内完成的,目前还有点bug。小组内的成员分别在不同技术方向上进行了探索,收获都还挺大的。这篇博客就当一个项目总结吧,写的难免有纰漏之处,有想法和问题可以在评论区交流。
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
