社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群

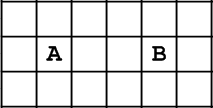
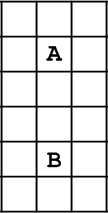
1.1 图A中出现在同一条直线无障碍物的圈圈可以消除。
1.2 图B中两个圈圈可以通过一次转弯消除。
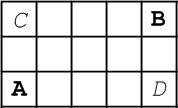
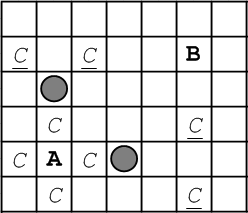
1.3 图C和图D中可以通过两次转弯消除两个圈圈。
已知一个接口可以判断坐标 (x,y)上有障碍物:
/// <summary>
/// 判断是否有障碍物
/// </summary>
/// <param name="x">X坐标</param>
/// <param name="y">Y坐标</param>
/// <param name="y">Y坐标</param>
/// <returns>是否有障碍物</returns>
private static bool isBlocked(int x, int y, int[][] obstaclesArray) {
//取出坐标位置的点 并且值不小于0 就是有障碍物
if (obstaclesArray.Length > y && y >= 0) {
if (obstaclesArray[y].Length > x && x >= 0)
{
int tmp = obstaclesArray[y][x];
if (obstaclesArray[y][x] >= 0)
{
return true;
}
}
}
return false;
}
/// <summary>
/// 求两个整数的最小值
/// </summary>
/// <param name="x"></param>
/// <param name="y"></param>
/// <returns></returns>
private static int min(int x, int y) {
return (x < y) ? (x) : (y);
}
/// <summary>
/// 求两个整数的最大值
/// </summary>
/// <param name="x"></param>
/// <param name="y"></param>
/// <returns></returns>
static int max(int x, int y)
{
return (x > y) ? (x) : (y);
}
2.1.1 同一水平线上
水平检测就是检测是否是同一个点,同时满足两者水平方向之间没有障碍物
代码:
/// <summary>
/// 水平检测两点之间是否可以连接消除
/// </summary>
/// <param name="x1">第一个点的横坐标</param>
/// <param name="y1">第一个点的纵坐标</param>
/// <param name="x2">第二个点的横坐标</param>
/// <param name="y2">第二个点的纵坐标</param>
/// <returns>水平方向的两点是否可以连接消除</returns>
private static bool horizon(int x1, int y1, int x2, int y2, int[][] obstaclesArray)
{
if (x1 == x2 && y1 == y2)
{
return false;
}
if (y1 != y2)
{
return false;
}
int start_x = min(x1, x2);
int end_x = max(x1, x2);
//如果两者相邻 可以消除
if (start_x + 1 == end_x) {
return true;
}
//判断直线中间是否有障碍物
for (int i = start_x+1; i < end_x; i++)
{
if (isBlocked(i, y1,obstaclesArray))
{
return false;
}
}
return true;
}
2.1.2 同一竖直直线上
竖直检测就是检测是否是同一个点,同时满足两者竖直方向之间没有障碍物
代码:
/// <summary>
/// 一个拐角是否可以连接检测
/// </summary>
/// <param name="x1">第一个点的横坐标</param>
/// <param name="y1">第一个点的纵坐标</param>
/// <param name="x2">第二个点的横坐标</param>
/// <param name="y2">第二个点的纵坐标</param>
/// <param name="location">连接的节点</param>
/// <returns>一个拐角是否可以满足连接</returns>
///
private static bool turn_once(int x1, int y1, int x2, int y2,out (int,int) location,int[][] obstaclesArray)
{
location = (0,0);
if (x1 == x2 && y1 == y2)
{
return false;
}
int c_x = x1, c_y = y2;
int d_x = x2, d_y = y1;
bool ret = false;
if (!isBlocked(c_x, c_y,obstaclesArray))
{
//两个坐标 所在横竖四条直线交叉中的第一个交点检测
ret |= vertical(x1, y1, c_x, c_y,obstaclesArray) && horizon(c_x, c_y, x2, y2,obstaclesArray);
if (ret) {
location = (c_x, c_y);
}
}
else {
//两个坐标 所在横竖四条直线交叉中的另一个交点检测
if (!isBlocked(d_x, d_y,obstaclesArray))
{
ret |= horizon(x1, y1, d_x, d_y,obstaclesArray) && vertical(d_x, d_y, x2, y2,obstaclesArray);
if (ret) {
location = (d_x, d_y);
}
}
}
if (ret)
{
return true;
}
return false;
}
一个拐角检测可以分解为一个水平检测和垂直检测,两个检测同时满足的时候,便可以通过一个拐角连接两点。一个拐角检测 = 水平检测 && 垂直检测。
A 点至 B 点能否连接可转化为满足任意一点:
/// <summary>
/// 一个拐角是否可以连接检测
/// </summary>
/// <param name="x1">第一个点的横坐标</param>
/// <param name="y1">第一个点的纵坐标</param>
/// <param name="x2">第二个点的横坐标</param>
/// <param name="y2">第二个点的纵坐标</param>
/// <param name="location">连接的节点</param>
/// <returns>一个拐角是否可以满足连接</returns>
///
private static bool turn_once(int x1, int y1, int x2, int y2,out (int,int) location,int[][] obstaclesArray)
{
location = (0,0);
if (x1 == x2 && y1 == y2)
{
return false;
}
int c_x = x1, c_y = y2;
int d_x = x2, d_y = y1;
bool ret = false;
if (!isBlocked(c_x, c_y,obstaclesArray))
{
//两个坐标 所在横竖四条直线交叉中的第一个交点检测
ret |= vertical(x1, y1, c_x, c_y,obstaclesArray) && horizon(c_x, c_y, x2, y2,obstaclesArray);
if (ret) {
location = (c_x, c_y);
}
}
else {
//两个坐标 所在横竖四条直线交叉中的另一个交点检测
if (!isBlocked(d_x, d_y,obstaclesArray))
{
ret |= horizon(x1, y1, d_x, d_y,obstaclesArray) && vertical(d_x, d_y, x2, y2,obstaclesArray);
if (ret) {
location = (d_x, d_y);
}
}
}
if (ret)
{
return true;
}
return false;
}
两个拐角检测可以分解为一个拐角检测和水平检测或者垂直检测。
即:两个拐角检测 = 一个拐角检测 && (水平检测 || 竖直检测)
水平和竖直分别穿过AB公有四条线,扫描直线上所有不包含AB的点,看是否存在一个点C,满足任意一项:
代码:
/// <summary>
/// 两个拐点连接检测
/// </summary>
/// <param name="x1">第一个点的横坐标</param>
/// <param name="y1">第一个点的纵坐标</param>
/// <param name="x2">第二个点的横坐标</param>
/// <param name="y2">第二个点的纵坐标</param>
/// <param name="maxX">连连看布局的列数</param>
/// <param name="location0">最优解第一个拐弯的节点</param>
/// <param name="location1">最优解第二个拐弯的节点</param>
/// <param name="maxY">连连看布局的行数</param>
/// <returns>两个拐点是否可以连接检测结果</returns>
private static bool turn_twice_best(int x1, int y1, int x2, int y2,int maxX,int maxY,out (int,int) location0,out (int,int) location1, int[][] obstaclesArray)
{
location0 = (0, 0);
location1 = (0, 0);
if (x1 == x2 && y1 == y2)
{
return false;
}
int start_y = min(y1, y2);
int end_y = max(y1, y2);
var locTmp0 = (0,0);
var locTmp1 = (0,0);
for (int j = -1; j <= maxY; j++)
{
for (int i = -1; i <= maxX; i++)
{
if (i != x1 && i != x2 && j != y1 && j != y2)
{
continue;
}
if ((i == x1 && j == y1) || (i == x2 && j == y2))
{
continue;
}
if (isBlocked(i, j,obstaclesArray))
{
continue;
}
// //拆开校验
// bool turnOnce = turn_once(x1, y1, i, j, out location0, obstaclesArray);
// bool horizonTmp = horizon(i, j, x2, y2, obstaclesArray);
// bool verticalTmp = vertical(i, j, x2, y2, obstaclesArray);
//
// if (turnOnce && (horizonTmp || verticalTmp))
// {
//
// }
// else
// {
// bool turnOnce1 = turn_once(i, j, x2, y2,out location1,obstaclesArray);
// bool horizonTmp1 = horizon(x1, y1, i, j,obstaclesArray);
// bool verticalTmp1 = vertical(x1, y1, i, j,obstaclesArray);
//
//
// }
bool canRemoveResult = turn_twice_one(x1, y1, i,j,x2, y2,out locTmp0, out locTmp1, obstaclesArray);
if (canRemoveResult)
{
if (location0.Item1 ==0 && location0.Item2 == 0 && location1.Item1 == 0 && location1.Item2 == 0)
{
location0 = locTmp0;
location1 = locTmp1;
}
else
{
var pathCount0 = pathCount(x1, y1, x2, y2, location0, location1);
var pathCount1 = pathCount(x1, y1, x2, y2, locTmp0, locTmp1);
if (pathCount1 < pathCount0)
{
location0 = locTmp0;
location1 = locTmp1;
}
}
}
canRemoveResult = turn_twice_two(x1, y1, i,j,x2, y2,out locTmp0, out locTmp1, obstaclesArray);
if (canRemoveResult)
{
if (location0.Item1 ==0 && location0.Item2 == 0 && location1.Item1 == 0 && location1.Item2 == 0)
{
location0 = locTmp0;
location1 = locTmp1;
}
else
{
var pathCount0 = pathCount(x1, y1, x2, y2, location0, location1);
var pathCount1 = pathCount(x1, y1, x2, y2, locTmp0, locTmp1);
if (pathCount1 < pathCount0)
{
location0 = locTmp0;
location1 = locTmp1;
}
}
}
}
}
return (location0.Item1 != 0 || location0.Item2 != 0 || location1.Item1 != 0 || location1.Item2 != 0);
}
/// <summary>
/// 求折线的总路径数量
/// </summary>
/// <param name="x1">开始点的横坐标</param>
/// <param name="y1">开始点的纵坐标</param>
/// <param name="x2">结束点的横坐标</param>
/// <param name="y2">结束点的纵坐标</param>
/// <param name="location0">第一个拐角点</param>
/// <param name="location1">第二个拐角点</param>
/// <returns></returns>
private static int pathCount(int x1, int y1, int x2, int y2, (int, int) location0, (int, int) location1)
{
var count = 0;
count += pointPointLength((x1, y1), location0);
count += pointPointLength(location0, location1);
count += pointPointLength(location1, (x2, y2));
return count;
}
/// <summary>
/// 求两个点的横纵坐标差绝对值之和
/// </summary>
/// <param name="location0"></param>
/// <param name="location1"></param>
/// <returns></returns>
private static int pointPointLength((int, int) location0, (int, int) location1)
{
return System.Math.Abs(location0.Item1 - location1.Item1) + System.Math.Abs(location0.Item2 - location1.Item2);
}
/// <summary>
/// 第一种双折方式是否可以消除
/// </summary>
/// <param name="x1">第一个点横坐标</param>
/// <param name="y1">第一个点的纵坐标</param>
/// <param name="i">选中的点横坐标</param>
/// <param name="j">选中点的纵坐标</param>
/// <param name="x2">第二个点的横坐标</param>
/// <param name="y2">第二个点的纵坐标</param>
/// <param name="location0">第一个折点坐标</param>
/// <param name="location1">第二个折点坐标</param>
/// <param name="obstaclesArray">原始数据矩阵</param>
/// <returns>是否可以消除</returns>
private static bool turn_twice_one(int x1, int y1, int i, int j,int x2, int y2, out (int, int) location0,
out (int, int) location1, int[][] obstaclesArray)
{
location0 = (0, 0);
location1 = (0, 0);
if (turn_once(x1, y1, i, j,out location0,obstaclesArray) && (horizon(i, j, x2, y2,obstaclesArray) || vertical(i, j, x2, y2,obstaclesArray)))
{
location1 = (i, j);
return true;
}
return false;
}
/// <summary>
/// 第二种双折方式是否可以消除
/// </summary>
/// <param name="x1">第一个点横坐标</param>
/// <param name="y1">第一个点的纵坐标</param>
/// <param name="i">选中的点横坐标</param>
/// <param name="j">选中点的纵坐标</param>
/// <param name="x2">第二个点的横坐标</param>
/// <param name="y2">第二个点的纵坐标</param>
/// <param name="location0">第一个折点坐标</param>
/// <param name="location1">第二个折点坐标</param>
/// <param name="obstaclesArray">原始数据矩阵</param>
/// <returns>是否可以消除</returns>
private static bool turn_twice_two(int x1, int y1,int i,int j, int x2, int y2, out (int, int) location0,
out (int, int) location1, int[][] obstaclesArray)
{
location0 = (0, 0);
location1 = (0, 0);
if (turn_once(i, j, x2, y2,out location1,obstaclesArray) && (horizon(x1, y1, i, j,obstaclesArray) || vertical(x1, y1, i, j,obstaclesArray)))
{
location0 = (i, j);
return true;
}
return false;
}
两个点是否可以连接消除的判断就是对两个点判断是否满足步骤2 中的某一种情况。
满足消除条件之后,给出建议路径。
// ReSharper disable Unity.PerformanceAnalysis
/// <summary>
/// 检测两点是否可以消除
/// </summary>
/// <param name="x1">第一个点的横坐标</param>
/// <param name="y1">第一个点的纵坐标</param>
/// <param name="x2">第二个点的横坐标</param>
/// <param name="y2">第二个点的纵坐标</param>
/// <param name="obstaclesArray">布局的矩阵</param>
/// <param name="result">可消除节点路径</param>
/// <returns>是否可以消除</returns>
public static bool isCanRemove(int x1, int y1, int x2, int y2, int[][] obstaclesArray, out List<(int, int)> result)
{
// string startEndPointStr = $"开始点消除方法开始 :({x1},{y1}), 结束点:({x2},{y2})";
bool ret = false;
result = new List<(int, int)>();
// 检测行数是否大于0 并且 每一行的元素个数都相等
int rows = obstaclesArray.Length;
int columnsFirst = 0;
if (rows > 0)
{
columnsFirst = obstaclesArray[0].Length;
if (rows > 1) {
for (int index = 0; index < rows; index++)
{
int columns = obstaclesArray[index].Length;
if (columnsFirst != columns)
{
return false;
}
}
}
}
else {
return false;
}
// 横向检测
ret = horizon(x1, y1, x2, y2,obstaclesArray);
if (ret)
{
result.Add((x1, y1));
result.Add((x2, y2));
return true;
}
//竖向检测
ret = vertical(x1, y1, x2, y2,obstaclesArray);
if (ret)
{
result.Add((x1, y1));
result.Add((x2, y2));
return true;
}
//一个拐角检测
ret = turn_once(x1, y1, x2, y2,out (int,int) location,obstaclesArray);
if (ret)
{
result.Add((x1, y1));
result.Add(location);
result.Add((x2, y2));
return true;
}
// 两个拐角检测
ret = turn_twice_best(x1, y1, x2, y2, columnsFirst, rows,out (int,int) location0,out (int,int) location1,obstaclesArray);
if (ret)
{
result.Add((x1, y1));
result.Add(location0);
result.Add(location1);
result.Add((x2, y2));
return true;
}
return false;
}4 对消消看初始数据给出建议
给出连连看初始数据,判断是否可以匹配消除并在可以消除的情况下给出消除路径。
/// <summary>
/// 是否有可以提示的消除路径
/// </summary>
/// <param name="obstaclesArray">障碍物二维数组 元素是整型 数据 小于0表示没有障碍物</param>
/// <param name="result">可以连接的节点</param>
/// <returns></returns>
public static bool isCanPrompt(int[][] obstaclesArray, out List<(int, int)> result) {
result = new List<(int, int)>();
// 检测行数是否大于0 并且 每一行的元素个数都相等
int rows = obstaclesArray.Length;
int columnsFirst = 0;
if (rows > 0)
{
columnsFirst = obstaclesArray[0].Length;
if (rows > 1)
{
for (int index = 0; index < rows; index++)
{
int columns = obstaclesArray[index].Length;
if (columnsFirst != columns)
{
return false;
}
}
}
}
else
{
return false;
}
Dictionary<int, List<(int, int)>> typeDic = new Dictionary<int, List<(int,int)>>();
for (int i = 0; i < rows; i++) {
for (int j = 0; j < columnsFirst; j++) {
int type = obstaclesArray[i][j];
if (type >= 0)
{
List<(int, int)> array = new List<(int, int)>();
typeDic.TryGetValue(type, out array);
if (array == null) {
array = new List<(int, int)>();
}
if (array != null) {
array.Add((j, i));
}
typeDic[type] = array;
}
}
}
Dictionary<int, List<(int, int)>>.ValueCollection valueColl = typeDic.Values;
//遍历值的集合
foreach (List <(int, int)> list in valueColl)
{
if (list.Count > 0) {
for (int i= 0;i < list.Count;i ++) {
for (int j = i+1; j < list.Count;j++) {
(int, int) startPosition = list[i];
(int, int) endPosition = list[j];
bool canRemove = isCanRemove(startPosition.Item1, startPosition.Item2, endPosition.Item1, endPosition.Item2, obstaclesArray,out result);
if (canRemove) {
return true;
}
}
}
}
}
return false;
}参考链接:https://blog.csdn.net/qq_41551359/article/details/82983513
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
