社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
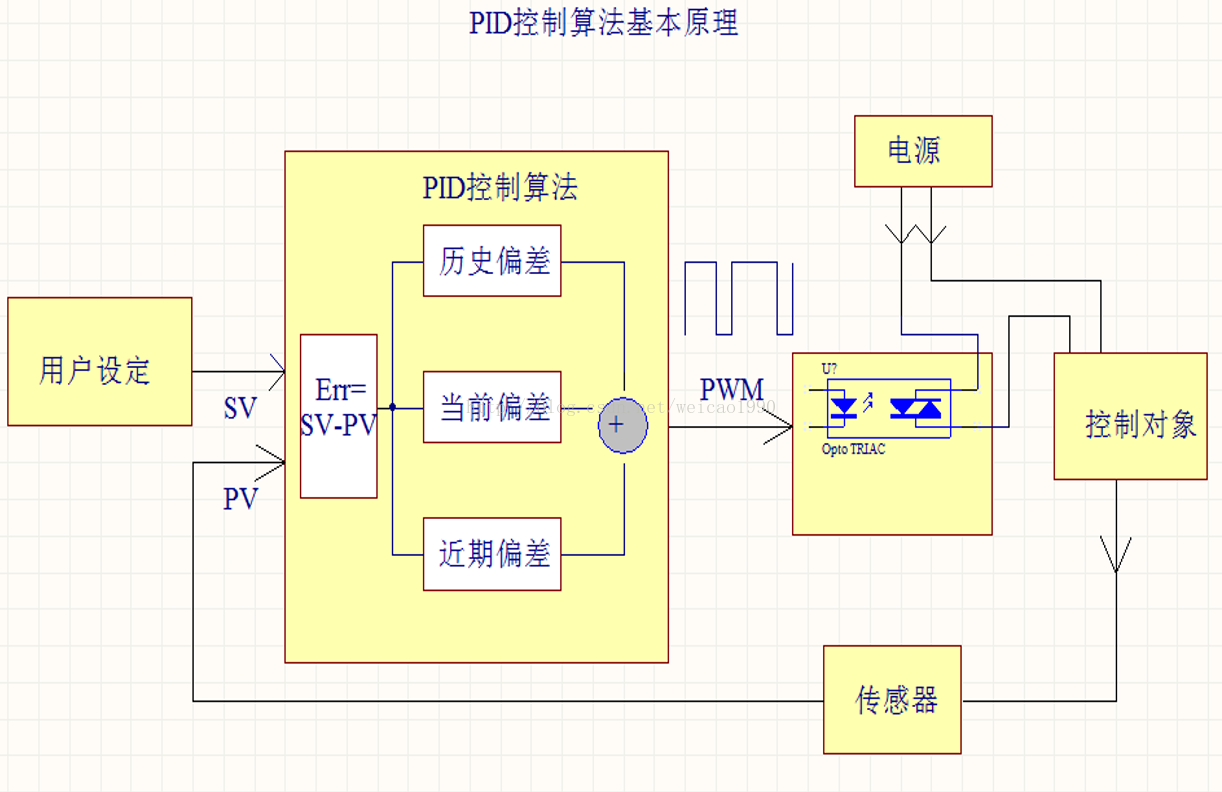
1.PID控制算法的基本思想
PID算法是一种具有预见性的控制算法,其核心思想是:
1>. PID算法不但考虑控制对象的当前状态值(现在状态),而且还考虑控制对象过去一段时间的状态值(历史状
态)和最近一段时间的状态值变化(预期),由这3方面共同决定当前的输出控制信号;
2>.PID控制算法的运算结果是一个数,利用这个数来控制被控对象在多种工作状态(比如加热器的多种功率,阀门的
多种开度等)工作,一般输出形式为PWM,基本上满足了按需输出控制信号,根据情况随时改变输出的目的。
2.PID算法分析:
设某控制系统:用户设定值为SV(也就是希望通过PID控制算法使被控制对象的状态值保持在SV的附近)。
1>从系统投入运行开始,控制算法每隔一段时间对被控制对象的状态值进行采样。由此,可得到开机以来由各个采
样时间点被控制对象的状态值所形成的数据序列:
X1,X2, X3, X4, .... Xk-2,Xk-1,Xk
说明:
X1:开机以来的第一次采样值
Xk: 目前的采样值(最近一次的采样值)
2> 从这个采样值序列中提取出三方面信息:
①当前采样值Xk与用户设定值SV之间的差值:Ek
Ek =Sv - Xk
分析Ek:
Ek >0:说明当前状态值未达标
Ek=0:说明当前控制状态值正好满足要求
Ek<0:说明当前状态值已经超标
结论:Ek反应了控制对象当前值与设定值的偏差程度,可以根据Ek的大小对输出信号OUT进行调整:偏差程度大
OUT增大,偏差程度小OUT减小。即输出信号的强弱与当前偏差程度的大小成比例,所以根据Ek的大小来给出控制信
号OUT的当前值的算法称为比例控制(Proportion)。用数学模型可以表示为:
POUT=(Kp*Ek)+ Out0
Kp:一般称之为比例系数,可以理解为硬件上的放大器(或衰减器),适当选取Kp将当前误差值Ek
按一定的增益放大或缩小,以提高控制算法的相应速度。
Out0:是一个常数,目的是为了当Ek为0时,确保输出信号不为0,以不至于在当前值与设定值相等时控制器输出信号
OUT为0,系统处于无控制信号的失控状态。
②将投入运行以来的各个采样值都与设定值相减,可得到开机以来每个采样时刻的偏差序列数据:
E1,E2,E3 .....Ek-2,Ek-1,Ek
说明:
E1:开机的第一个采样点与设定值的偏差
E1=SV-X1;
E2=SV-X2;
......
EK-2=SV-XK-2;
EK-1=SV-XK-1;
Ek: 当前的采样值与设定值的偏差
EK=SV-XK
分析开机以来的误差序列:
每个偏差值可能有:>0,<0,=0这三种可能的值,因为从开机到现在,控制算法不断输出控制信号对被控对象进行控制,导致了过去这段时间有时候超标(Ex<0),有些时候未达标(Ex>0),有时候正好满足要求(Ex=0);如果将这些偏差值进行累加求代数和得到Sk,即:
Sk=E1+E2+E3+.........+Ek-2+Ek-1+Ek
分析Sk:
Sk>0: 过去大多数时候未达标
Sk=0:过去控制效果较理想
Sk<0: 过去大多数时候已经超标
结论:
1.通过对Sk的分析,可以对控制算法过去的控制效果进行综合评估。体现了控制算法按照原来的方式输出的控制信号导致了现在的控制结果,所以应该利用这个值来对当前要输出的控制信号OUT进行修正,以确保控制对象会在将来的一小段时间尽快达到用户设定的值。
2.Sk实际上是过去每个时间点的误差相加,与数学上的定积分运算类似,因此根据Sk对输出信号进行调节的算法称积分(integral)算法。所以积分控制的数学模型为:
IOUT=(kp* ( (1/Ti) Exdt))+Out0
Kp是一常数,其目的类似硬件上的放大器,用于将Sk放大或衰减;
Out0是一常数,为了在历史积分偏差值为0时确保系统有一个输出值,避免失控;
Ti 是积分时间常数,取值越大会导致输出量OUT会越小,可理解为历史上已经很久的误差值都影响了当前的输出信号。取值越小,输出OUT会越强烈,可理解为积分只考虑了最近一段时间的误差。
实际中,如果系统已经运行“很长”一段时间了,那些早期采样的偏差值可以忽略他们对当前控制的影响,所以应该根据情况选择合理的Ti值方能得到良好的控制效果。
③最近两次的偏差之差 Dk
Dk=Ek-Ek-1
说明:
Ek: 当前的偏差
Ek-1: 基于当前的前一个采样时刻的偏差值 (即上一次的偏差值);
分析Dk:
Dk>0:说明从上一采样时刻到当前误差有增大趋势
Dk=0:说明从上一采样时刻到当前误差平稳
Dk<0:说明从上一采样时刻到当前误差有减小趋势
结论:
1. Dk能够说明从上次采样到当前采样的这段时间被控制对象的状态变化趋势,这种变化的趋势很可能会在一定程度上延续到下一个采样时间点,所以可以根据这个变化趋势(Dk的值)对输出信号OUT进行调整,达到提前控制的目的。
2. Dk形如数学上的微分运算,反应了控制对象在一段时间内的变化趋势及变化量,所以利用Dk对控制器输出信号进行调节的算法称为微分(differential)算法。可以用数学模型表达为:
DOUT=Kp*(Td(de/dt))+Out0
Kp:为一常数,可理解为硬件上的放大器或衰减器,用于对输出信号OUT的增益进行调整;
Out0:为一常数,为了在Dk为0时确保OUT都有一个稳定的控制值,避免失控。
Td:叫微分时间常数,(犹如硬件上电感器的自感系数)Td越大导致OUT增大,对输出信号产生强烈的影响。
3>PID算法的形成
1.比例、积分、微分三种算法的优缺点分析:
POUT=(Kp*Ek)+ Out0 --比例算法
IOUT=kp* ( (1/Ti) Exdt)+Out0 --积分算法
DOUT=Kp*(Td(de/dt))+Out0 --微分算法
比例算法: 只考虑控制对象当前误差,当前有误差才输出控制信号,当前没有误差就不输出控制信号,也就是说只要
偏差已经产生了比例算法才采取措施进行调整,所以单独的比例算法不可能将控制对象的状态值控制在设定值上,始
终在设定值上下波动;但是比例控制反应灵敏,有误差马上就反应到输出。
积分算法:考虑了被控制对象的历史误差情况,过去的误差状况参与了当前的输出控制,但是在系统还没有达到目标
期间,往往会因为这些历史的误差对当前的控制产生了干扰(即拖后腿),使用不当反而搅乱当前的输出。但是在系
统进入稳定状态后,特别是当前值与设定值没有偏差时,积分算法可以根据过去的偏差值输出一个相对稳定的控制信
号,以防止产生偏离目标,起到打预防针的效果。
微分算法:单纯的考虑了近期的变化率,当系统的偏差趋近于某一个固定值时(变化率为0),微分算法不输出信号对
其偏差进行调整,所以微分算法不能单独使用,它只关心偏差的变化速度,不考虑是否有偏差(偏差变化率为0时偏
差不一定是0).但是微分算法能获得控制对象近期的变化趋势,它可以协助输出信号尽早的抑制控制对象的变化。可
以理解为将要有剧烈变化时就大幅度调整输出信号进行抑制,避免了控制对象的大幅度变化。
以上三种算法综合起来产生一个当前的控制量对控制对象进行控制,它们的优缺点互补,即形成经典的PID算法。
2.PID算法数学模型
OUT= POUT+ IOUT+ DOUT
即:
整理该式子得到:将各项的Out0归并为OUT0。

3.PID算法在单片机中的应用
1) PID算法在单片机中应用时,对积分和微分项可以作近似变换:
对于积分项可改写成:
n
I =1/Ti∑Ek*T
k=0
即用过去一段时间的采样点的偏差值的代数和的代替积分。
T是采样周期,也叫控制周期,每隔T时间段进行一次PID计算。
对于微分项可改写成:
D=TD*((Ek-Ek-1)/T)
Ek:本次偏差,Ek-1上次的偏差值
2)位置式PID算法数学模型
由此可得到单片机中PID算法的表达式:
OUT=kp( Ek+ ( (1/Ti) Exdt))+ (Td(de/dt)))+OUT0
=>
OUT=
n
Kp(En+(1/Ti∑Ek*T)+(TD*((Ek-Ek-1)/T)))+out0
k=0
进一步展开得:
n
OUT=(Kp*Ek) + (Kp*(T/Ti)∑Ek) +(Kp*(TD/T)(EK-Ek-1)) +OUT0
k=0
令 Ki= Kp*(T/Ti);
KD=(Kp*(TD/T)
故:
n
OUT=(Kp*Ek) + (Ki∑Ek) +(KD(EK-Ek-1)) +OUT0
k=0
程序设计时利用C语言或汇编语言可以方便实现这个计算公式。OUT即为本次运算的结果,利用OUT可以去驱动执行
机构输出对应的控制信号,例如温度控制就可以控制PWM的宽度,电磁阀就可以改变电磁线圈电流以改变阀门开
度,或者是可控硅的导通角度等;
这种PID算法计算出的结果(OUT值)表示当前控制器应该输出的控制量,所以称为位置式(直接输出了执行机构应
该达到的状态值)。
3)增量式PID算法
位置式PID算法计算量较大,比较消耗处理器的资源。在有些控制系统中,执行机构本身没有记忆功能,比如MOS
管是否导通完全取决于控制极电压,可控硅是否导通取决于触发信号,继电器是否接通取决于线圈电流等,只要控制
信号丢失,执行机构就停止,在这些应用中应该采用位置式PID。
也有一些执行机构本身具有记忆功能,比如步进电机,即使控制信号丢失,由于其自身的机械结构会保持在原来的
位置等,在这些控制系统中,PID算法没有必要输出本次应该到达的真实位置,只需要说明应该在上次的基础上对输
出信号做多大的修正(可正可负)即可,这就是增量式PID算法。
增量式PID计算出的是应该在当前控制信号上的调整值,如果计算出为正,则增强输出信号;如果计算出为负则减
弱输出信号。
增量式PID算法数学模型:
如果用OUTK-1表示上次的输出控制信号值,那么当前的输出值应该为OUTk,这两者之间的关系为:
OUTK=OUTk-1 + OUT
OUT即为应该输出的增量值;
上式变形得:
OUT= OUTK- OUTk-1
本次的位置式算法输出:
n
OUTk=(Kp*Ek)+ (Ki∑Ek) +(KD(EK-Ek-1)) +OUT0 --1式
k=0
上次的位置式算法输出:
n-1
OUTk-1=(Kp*Ek-1) +(Ki∑Ek) +(KD(EK-1-Ek-2)) +OUT0 --2式
k=0
上述1式减2式即得到相邻两次的增量:
如前所述:
Ki= Kp*(T/Ti);
KD=(Kp*(TD/T)
OUT= OUTK- OUTk-1 = kp(EK-EK-1)+((Kp*T)/Ti)Ek+(((Kp*TD)/T)*(Ek-2Ek-1+Ek-2))
EK: 本次的偏差;
Ek-1:上次的偏差
Ek-2:上上次的偏差
Kp: 算法增益调节
Ti : 积分时间
TD: 微分时间常数
结论:
增量式PID的计算只需要最近3次的偏差(本次偏差,上次偏差,上上次偏差),不需要处理器存储大量的历史偏差值,计算量也相对较少,容易实现。
4)关于Ti和TD的理解:
在PID控制算法中,当前的输出信号由比例项,积分项,微分项共同作用形成,当比例项输出不为0时,如果积分项
对运算输出的贡献作用与比例项对运算对输出的贡献一样时(即同为正或同为负时),积分项相当于重复了一次比例
项产生作用的时间,这个时间就可以理解为积分时间。
当比例项不为0时,如果微分项在一段时间里计算的结果与比例项对输出的贡献相同(即同为正或同为负)时,微分
项相当于在一段时间里重复了比例项的作用,这段时间可理解为就是微分时间。
实际应用中应该合理选择Kp,Ti,Td以确保三者对输出的贡献平衡,从而使控制对象在设定值的附近。
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!