社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
下面的文章是我转载的。所以作者若是看到不允许转载,请给我留言或给我邮件(lushiliangcsdn@163.com),我会立即删除。
转载原因:这篇文章把pid 算法解释的很详细。我担心以后这篇文章无故删除,才转载到我这边的。谢谢。
平衡小车和倒立摆都是用的位置式PID控制器
/**************************************************************************
函数功能:位置式PID控制器
1.入口参数:编码器测量位置信息,目标位置
2.入口参数:编码器测量速度 , 目标速度
返回 值:电机PWM
根据位置式离散PID公式
pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2,,k;
pwm代表输出
**************************************************************************/
int Position_PID (int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Encoder-Target; //计算偏差
Integral_bias+=Bias; //求出偏差的积分
Pwm=Position_KP*Bias+Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias); //位置式PID控制器
Last_Bias=Bias; //保存上一次偏差
return Pwm; //增量输出
}
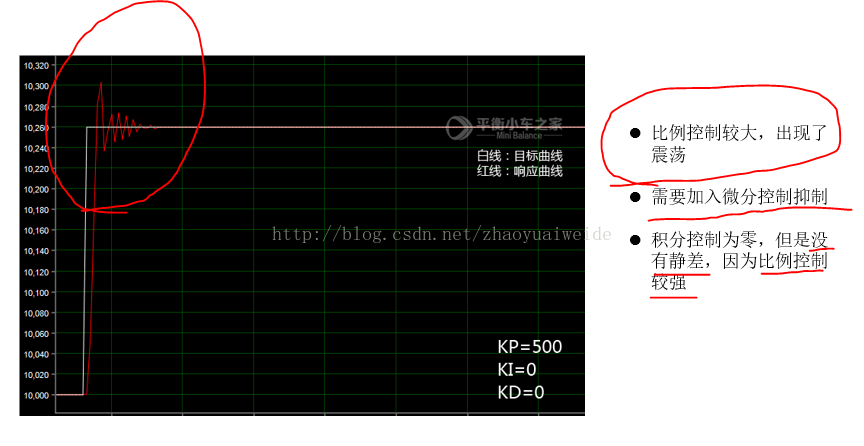
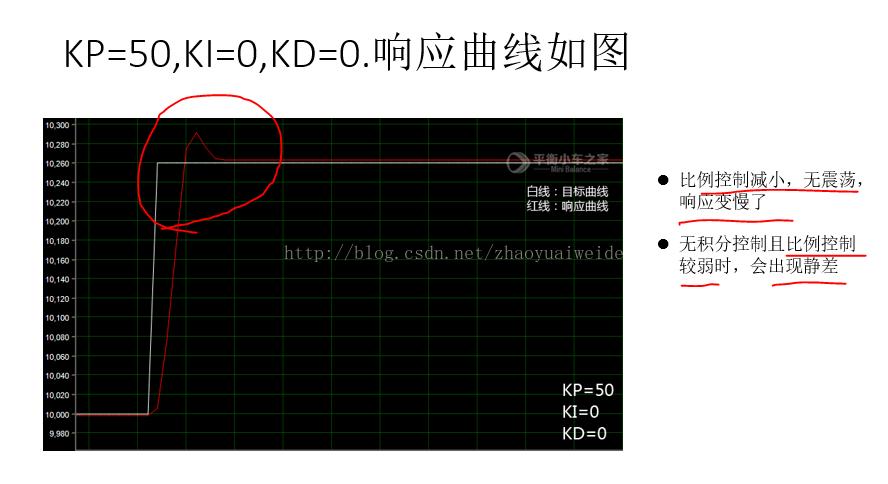
P:响应速度 过小响应速度太慢,基本不震荡;过大响应速度快,高频振荡;
I:静差 当有静差的时候把I加大点即可消除
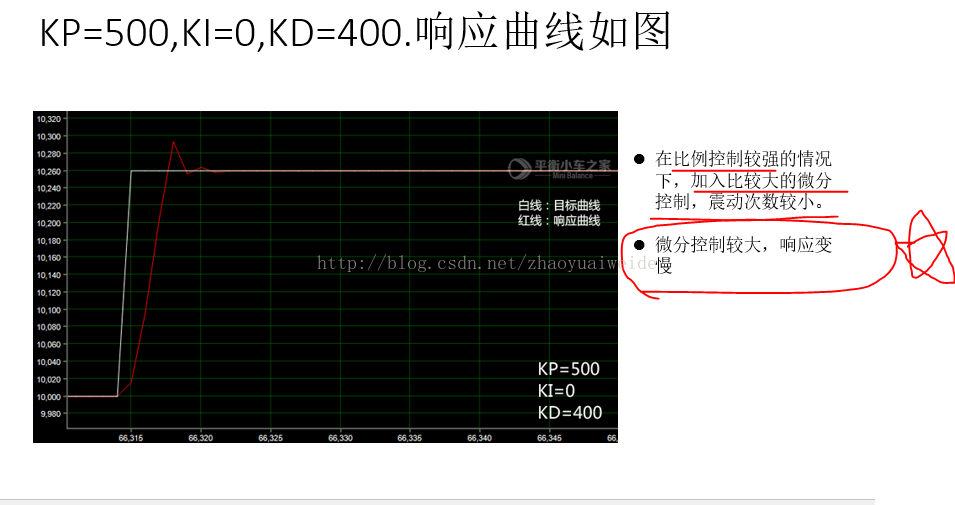
d:稳态 减小最大超调量,该参数过大会低频振荡
总结::P用于提高响应速度、I用于减小静差、D用于抑制震荡。
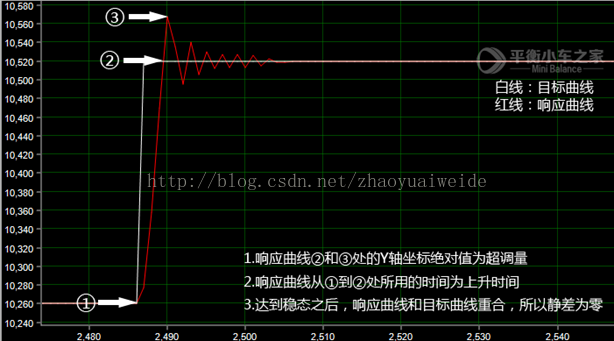
l最大超调量是响应曲线的最大峰值与稳态值的差,是评估系统稳定性的一个重要指标;
l上升时间是指响应曲线从原始工作状态出发,第一次到达输出稳态值所需的时间,是评估系统快速性的一个重要指标;
l静差是被控量的稳定值与给定值之差,一般用于衡量系统的准确性,
具体的参数调试过程:见位置pid参数控制整定如下:
KP=500,KI=0,KD=0.响应曲线如图
以上是入口参数的位置的参数整定过程,下面说一说入口参数是速度的参数整定过程:
对于位置式的pid用于调试达到目标速度,就用PI控制器就足够了,因为如果加微分的话会有很大抖动,所以大家一般都用PI控制器来调试速度。
具体参数整定原则:一开始先加大比例P,p小了会达不到目标速度,会差很多,所以再加大p,知道电机出现‘嗒嗒嗒’的抖动或者观察上位机的波形剧烈抖动的时候,这时候p就过大了,实际上p可以不是很大,比如400,调试时候增加幅值可以设为20,I稍微来点就可以,平衡车的工程经验是ki=kp/200,但是这里我给的是0.01,还要看具体情况,积分参数过大,实际速度和目标速度的静差会很大。
---------------------
作者:假如明天没有太阳
来源:CSDN
原文:https://blog.csdn.net/zhaoyuaiweide/article/details/54573676
版权声明:本文为博主原创文章,转载请附上博文链接!
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!