社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
kinectfusion是微软研究院利用kinect进行三维重建的项目,深入了解该算法及其实现可以为3D重建的kinect类应用提供一定的参考。该项目本身需要比较强大的CUDA显卡支持实现实时重建。
相应的开源版本可以使用KinFu,其下载地址在http://pointclouds.org/downloads/
KinectFusion重建的基本流程是(according to 《Real-time 3D Reconstruction and interaction Using a Moving Depth Camera》)
在进行下面的处理处理之前,kinectFusion实际还对原始的深度信息进行了一定的降噪平滑,采用双边滤波(Bilateral filtering),在保留边缘的基础上进行平滑,是个可以接受的选择。
主要是求出有原先的图像点u=(x,y),以及深度值D(u),求得每个点的法向量n(u)。根据相机的内部矩阵,将图像2D坐标转化为相机原点坐标系的3D点。
此步骤用ICP(iterative closest point)算法,求解出相机每次的相对位移与转动。相机位置可以用来将相机原点坐标系的结果转化到世界坐标系。
采用的基本算法根据这篇paper的研究《S. Rusinkiewicz and M. Levoy. Efficient variants of the
ICP algorithm. 3D Digital Imaging and Modeling, Int.
Conf. on, 0:145, 2001.》
其cuda算法实现如下
详细的介绍可以参考http://blog.csdn.net/viewcode/article/details/8426846 中关于fasticp的介绍。
每次迭代的基本思路就是:
经过上面的一次迭代,我们找到一堆匹配点,并求出其中使得匹配度最优(可以取类似最小二乘的值)的T,然后将本次测量的深度图进行相应的变换来进行下次迭代。
由于采用的是类似连续图像处理的方式,每一帧的深度测量值相差都很接近,这样才能使得算法能够迭代收敛。对每个点用一个GPU线程去处理的方法有效的简化了ICP的过程。
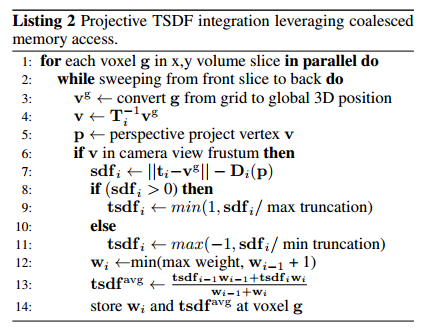
上一环节已经形成了每个相机图像个子的T和R,可以将每一帧采集的数据转化成世界坐标系当中。通过本环节的操作,我们可以形成水密的物体重建,采用TSDF(Truncated Signed Distance Function)的方法。
接下来我们对每一步进行解释,非常通俗易懂且巧妙的算法:
将重建空间进行体素划分,比如划分成
5123 (即长宽高都是512的立方体晶格)。
我们将整个空间的体素全部存入GPU的显存,所以KinectFusion的这种算法对显存的消耗极大,如果不加改造直接用在大场景的重建会有问题。但是显存随着硬件发展在不断增加,同时一些减少显存消耗的算法改进(比如八叉树)能有效减少KinectFusion的显存消耗。
对于(x,y,z)的晶格坐标,每个GPU进程扫描处理一个(x,y)坐标下的晶格柱。
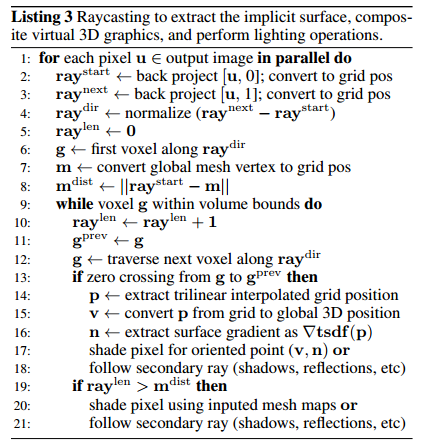
经过上面的扫描,最终立方体晶格中存储的tsdf值形成了重建物体外是负值,物体内部是正值,物体表面是0值得形式(可能没有准确的零值,但是可以根据正负值插值求出零值点,所以最后物体表面的分辨率将会超过晶格的分辨率)
之前的操作只是形成了
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!