社区微信群开通啦,扫一扫抢先加入社区官方微信群

社区微信群
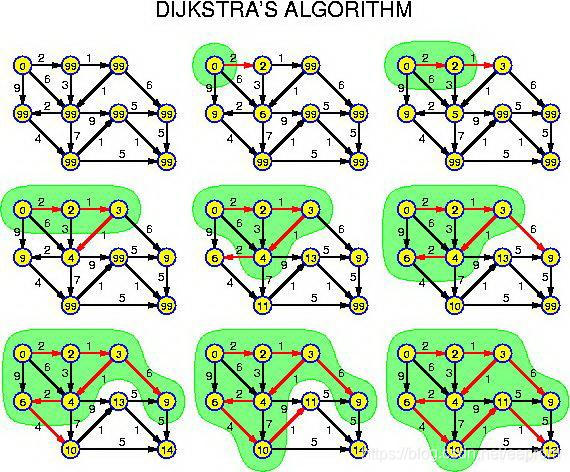
(额外说明一下:上面的图并非我原创,至少十几年前就已经存在了,哪位高人知道首次出现在哪里请告知我,我注明一下.)
源点:最开始的点,起点
终点:最后的点,目标到达的点
边权重Weight(m,n): 二维数组,代表连接顶点m到顶点n的边的权重值,即图上每条边的权重值.
顶点权重WeightMin(n): 一维数组,代表从起点到顶点n的所有通路上每条边权重之和的最小值.用来存放每一次计算的最小值.
FinalSet:已经确认的最终顶点的集合
图上数据说明: 顶点从左到右从上到下,坐标分别从0开始到8
Weight(m,n)的数据如下:
| n0 | n1 | n2 | n3 | n4 | n5 | n6 | n7 | n8 | |
|---|---|---|---|---|---|---|---|---|---|
| n0 | 2 | 9 | 6 | ||||||
| n1 | 1 | ||||||||
| n2 | 4 | 6 | |||||||
| n3 | 4 | ||||||||
| n4 | 2 | 9 | 7 | ||||||
| n5 | 5 | 1 | |||||||
| n6 | 5 | ||||||||
| n7 | 1 | 5 | |||||||
| n8 |
基础原理其实很朴素直白,就是从开始顶点(起点/源点)起,暴力穷举出能到达终止顶点(终点)的每一条通路并计算出距离。然后从所有的通路中找寻权重和最小的那一条通路。
不过这种朴素的找法有着明显缺点——随着顶点数增加,计算复杂度会上升得很快,(有多快?)粗略估算一下:
假设原本用暴力求解n个顶点所有通路的总条数为 T n T_{n} Tn,新增一个顶点后,顶点数从n变为n+1个,所有通路的总条数变为 T n + 1 T_{n+1} Tn+1。
如果我们找到了 T n + 1 − T n T_{n+1} - T_{n} Tn+1−Tn是多少,就可以大致知道这个增长率是多少了。我们试想一下,新加入的这个顶点,它不可能孤立存在的,它肯定会与原来(n顶点)的图有连接的,并且连接的边数一定是大于等于2的。那么,再假设这新加进来的这个顶点与原图相连接的边的数量为m条,当我们要用暴力求解这n+1个顶点所有通路总条数时,就是在原来n顶点的基础上,再从这m条新增的边里任意取2条边 C m 2 C_{m}^{2} Cm2,作为新顶点与原图连通时的入边与出边,从而形成一条通路。同时由于通路是具有方向性的,将同样的入边与出边对换一下则又是另一条通路,所以要乘以2,则n+1个顶点的总条数就应该是:
T n + 1 = T n + 2 ∗ C m 2 = T n + m ∗ ( m − 1 ) T n + 1 − T n = m 2 − m T_{n+1} = T_{n}+2*C_{m}^{2} = T_{n}+m*(m-1) \ T_{n+1} - T_{n} = m^{2}-m \ Tn+1=Tn+2∗Cm2=Tn+m∗(m−1)Tn+1−Tn=m2−m也就是说,通路总数的单位增量(导数)是关于新增临接边数m的二次函数。如果新增的顶点能与原图大部分顶点都能连通,则m正比于n,暴力求解的总数 T n T_{n} Tn的表达式就约正比于顶点数n的三次方。但新增顶点一般并非都与原图的每个顶点都连通,它通常只连通它附近的那几个顶点,所以有时候(稀疏图时)m甚至可能退化为一个与顶点数无关的常数,所以暴力求解的计算复杂度与图内各顶点间连接的密集程度有关,用暴力求解计算复杂度的上限是关于顶点数n的三次方
所以需要在这个原理的基础上做优化,因为对于到达之前某个顶点的最短距离已经确定了之后,我们可以把该顶点的最短距离存起来,当计算它之后的顶点通路时,就直接拿出来用,而不需要再重头计算之前的那些顶点。(扩展阅读:这里用到的就是备忘录思想,将已经得到的最好结果存入备忘录,如果下次需要使用,则直接拿出来用,减少重复计算。详细请查阅动态规划里的备忘录)
优化后的算法就是不断重复以下2个步骤:
【P1】运行【广度优先算法】刷新附近顶点的顶点权重,优先找到最接近源点的所有可见点1(↓脚注1:可见点解释↓),计算这些可见点到源点的 距离长度2 (↓脚注2:距离长度解释↓),由于一个顶点可能会有多条通路通过,所以当再次计算该点到源点的另一条通路的距离长度时,要与之前已计算过的顶点权重WeightMin[n]取最小值,然后再更新该点的权重。
【P2】每当运行完单次【广度优先算法】后,使用【贪心算法】从所有已知路径中选择长度最短的那条路径,将其顶点归入最终顶点集合里FinalSet里
然后跳到该顶点运行【广度优先算法】,即再次进行【P1】,然后又进行【P2】,就这样一直重复(P1-P2-P1-P2-…)下去,直至最终图里所有点都进入FinalSet里为止。
脚注1:可见点
所谓可见点,是指能和已选顶点直接连通的点
不能和已选顶点直接连通的点都是不可见点
脚注2:距离长度
简单地讲,距离长度就是该点到源点的某条具体通路上所有边权重Weight(n,m)之和距离长度等价于顶点权重,距离长度为了方便理解,顶点权重是为了方便存储距离长度.
(为什么要存储距离长度?)我们将某个点的距离长度保存下来,是为了当下次需要计算下一个顶点的距离长度时,不用将通路上所有边权重Weight(n,m)笨拙地全部求和一遍.而是直接使用保存下来的距离长度再加上新边的权重值Weight(n,m)就行了
【贪心算法】保证了进入FinalSet里的顶点距离一定是该点到源点所有可能路径中最短的,不可能有其他到达该点更短距离的路径(这个可以用反证法证明,假设存在另一条路径更短,可以推出矛盾的,我就不展开了)。
【广度优先算法】保证了在每次选择路径时,都不会漏掉任何一条可能的路径,并从这些可能的路径中找出最短的一条。
一般来说,【贪心算法】在很多时候并不都能找到全局最优解,只能得到局部最优解,我在文中虽然写的是“贪心算法”,但这只是为了帮助理解,实际上dijkstra运用的是【动态规划】的思想,结合【广度优先算法】从而保证了全局最优。
顶点对应关系:
node0: A
node1: B
node2: C
node3: D
node4: E
node5: F
node6: G
node7: H
node8: I
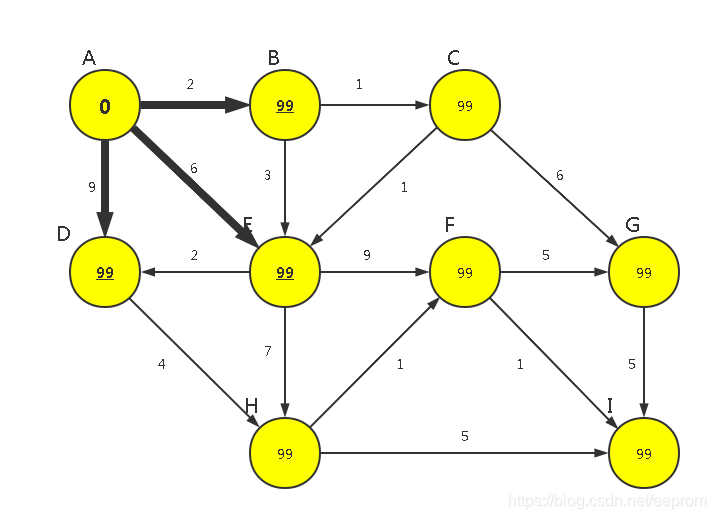
将所有顶点权重WeightMin[]更新为无穷大,暂时以99代替(因为所有顶点权重和都没有比99更大的,可以用来代替无穷大)。
【P1】初始条件为无,可见点则只有起点自己,从自己到自己的权重为0,WeightMin[0]=0,其余都是不可见点,都设置为99。
【P2】将顶点0(A点)归入最终顶点集合里FinalSet里,FinalSet[]={0},此时FinalSet未包含全部顶点,所以即将对顶点0(A点)运行【广度优先算法】
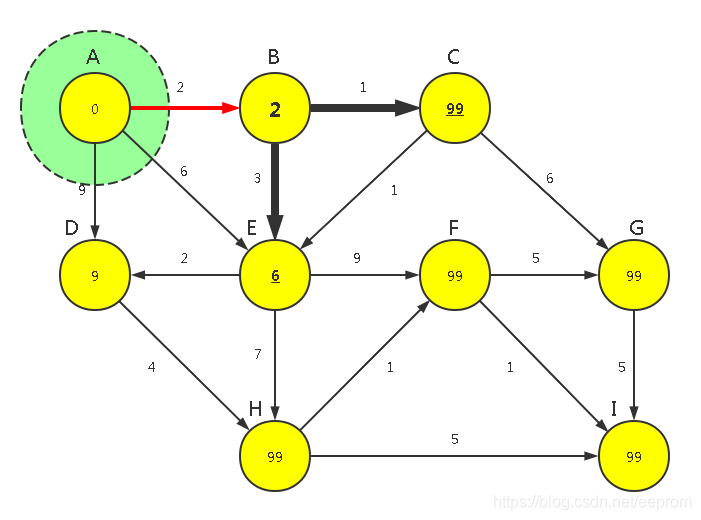
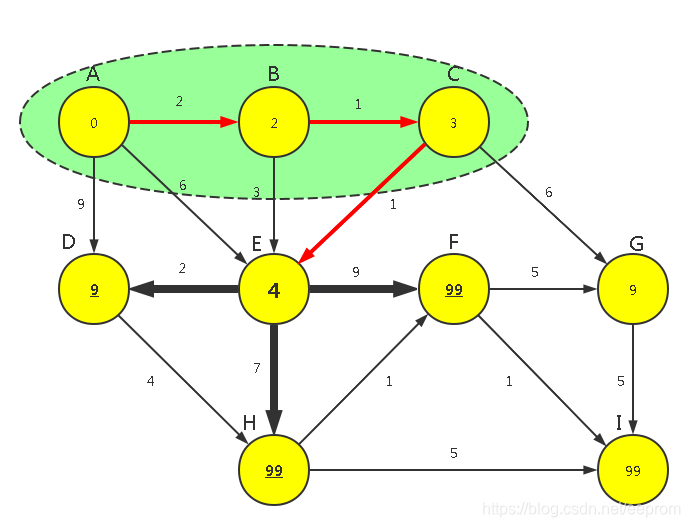
【P1】对顶点0(A点)运行【广度优先算法】,确认可见点为n1,n3,n4(BDE点)这3点,计算其所有可见点到源点n0通路的距离长度(使用已知的WeightMin[0]加上其直接连接的各边的权重Weight[0,(n1,n3,n4)]),分别是[0+2,0+9,0+6]。然后与之前这3个点的顶点权重WeightMin[[1,3,4]]:[99,99,99]进行比较,取最小值(2<99,9<99,6<99)然后再更新,所以最后刷新这3点的顶点权重WeightMin[[1,3,4]]=[2,9,6]。
【P2】从所有已知路径顶点n1(2),n3(9),n4(6)中找长度最短的那条,顶点n1(即B点),将其纳入最终顶点集合FinalSet={0,1},此时FinalSet未包含全部顶点,所以即将对顶点1(B点)运行【广度优先算法】
【P1】对顶点1(B点)运行【广度优先算法】,确认可见点为n2,n4(CE点)这2点,计算所有可见点到源点通路的距离长度WeightMin[1]+Weight[1,(n2,n4)]=[2+1,2+3]。然后与之前的顶点权重WeightMin[[2,4]:[99,6]进行比较更新,WeightMin[[2,4]]=[3,5]。
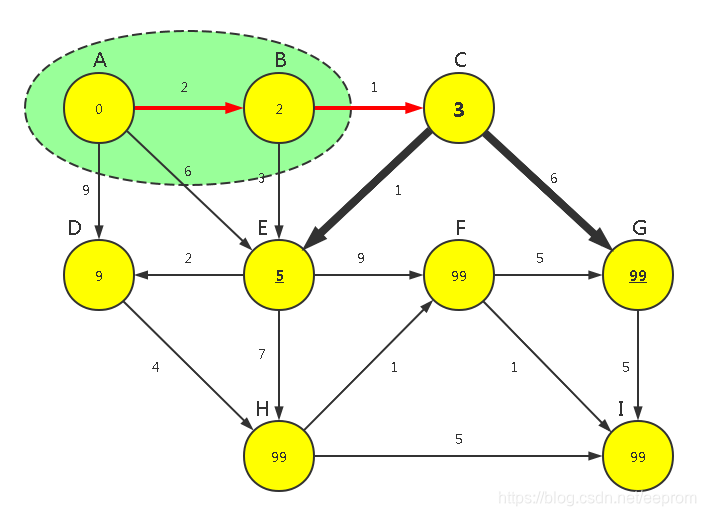
【P2】从所有已知路径顶点n2(3),n3(9),n4(5)中找长度最短的那条,是顶点n2(C点),将其纳入最终顶点集合FinalSet={0,1,2},此时FinalSet未包含全部顶点,所以即将对进来的顶点2(C点)运行【广度优先算法】
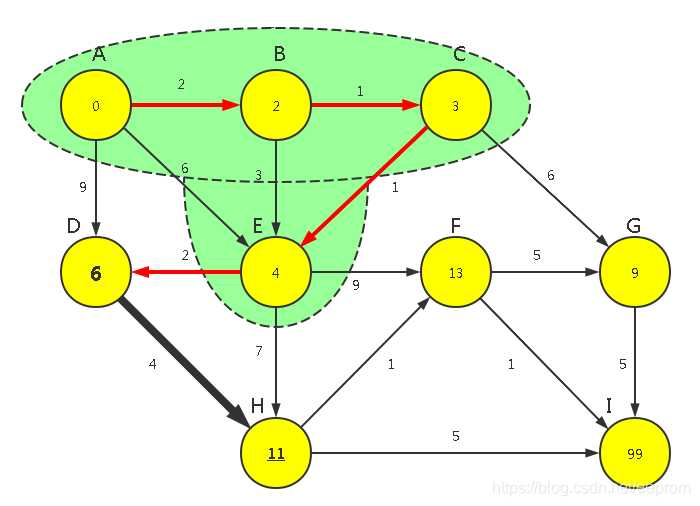
【P1】对顶点2(C点)运行【广度优先算法】,确认可见点为n4,n6(EG点)这2点,计算所有可见点到源点的通路的距离长度WeightMin[2]+Weight[1,(n4,n6)]=[3+1,3+6]。然后与之前的WeightMin[[4,6]:[5,99]进行比较更新,WeightMin[[4,6]=[4,9]。
【P2】从所有已知路径顶点n3(9),n4(4),n6(9)中找长度最短的那条,是顶点n4(E点),将其纳入最终顶点集合FinalSet={0,1,2,4},此时FinalSet未包含全部顶点,所以即将对进来的顶点4(E点)运行【广度优先算法】
【P1】对上次归入FinalSet的顶点运行【广度优先算法】求所有可见点的距离长度
g(n4) => (n3,n5,n7)
w(n3,n5,n7)=WeightMin[4]+Weight[4,(n3,n5,n7)]=[4+2,4+9,4+7]=[6,13,11]
WeightMin[[3,5,7]] = min([6,13,11] ,WeightMin[[3,5,7]]) = min([6,13,11] ,[9,99,99])=[6,13,11]
【P2】从所有已知路径顶点(=上一次全部顶点 - 上一次选中顶点 + 本次可见点)中选出长度最短的那条的顶点,归入FinalSet
min{n3,n5,n6,n7} = min{WeightMin[[3,5,6,7]]}=min([6,13,9,11])=6
n3
FinalSet={0,1,2,3,4}
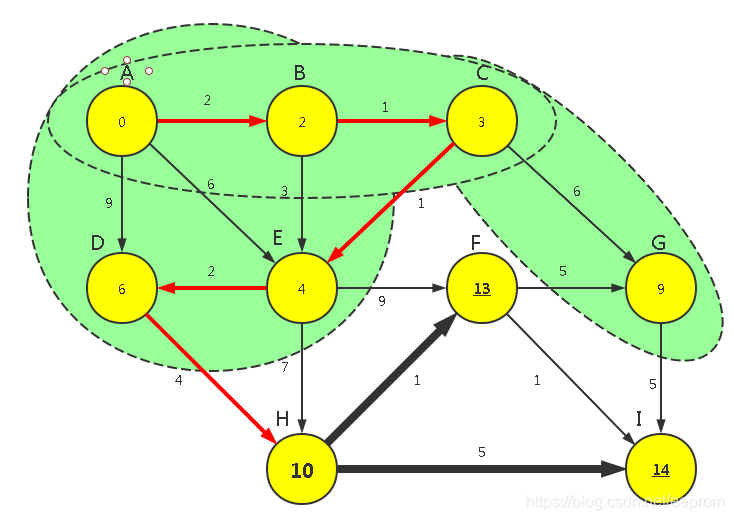
【P1】对上次归入FinalSet的顶点运行【广度优先算法】求所有可见点的距离长度
g(n3) => (n7)
w(n7) = WeightMin[3]+Weight[3,(n7)] = [6+4] = [10]
WeightMin[7] = min([10] ,WeightMin[7]) = min([10] ,[11]) = [10]
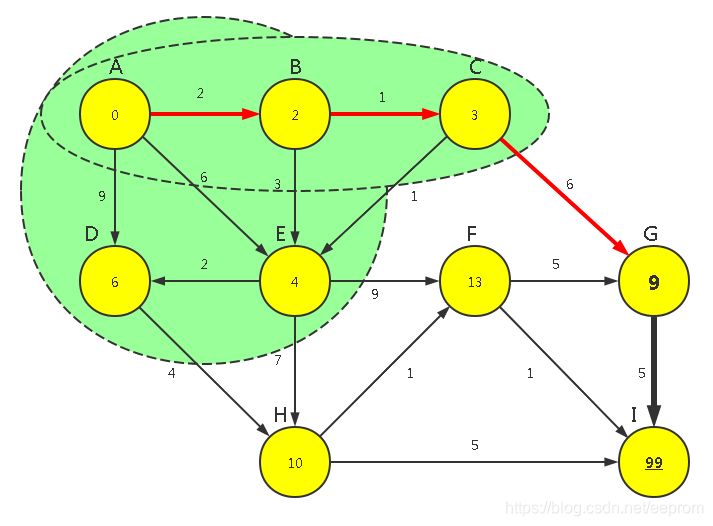
【P2】在所有已知路径中选出最短路径对应的顶点,归入FinalSet
min{n5,n6,n7} = min{WeightMin[[5,6,7]]} = min([13,9,10]) = 9
n6
FinalSet={0,1,2,3,4,6}
【P1】对上次归入FinalSet的顶点运行【广度优先算法】求所有可见点的距离长度
g(n6) => (n8)
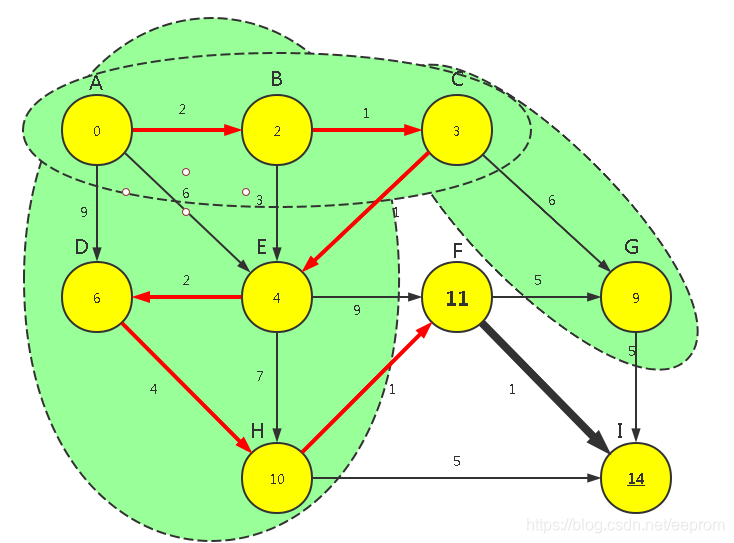
w(n8) = WeightMin[6]+Weight[6,(n8)] = [9+5] = [14]
WeightMin[8] = min([14] ,WeightMin[8]) = min([14] ,[99]) = [14]
【P2】在所有已知路径中选出最短路径对应的顶点,归入FinalSet
min{n5,n7,n8} = min{WeightMin[[5,7,8]]} = min([13,10,14]) = 10
n7
FinalSet={0,1,2,3,4,6,7}
【P1】对上次归入FinalSet的顶点运行【广度优先算法】求所有可见点的距离长度
g(n7) => (n5,n8)
w(n5,n8) = WeightMin[7]+Weight[7,(n5,n8)] = [10+1,10+5] = [11,15]
WeightMin[[5,8]] = min([11,15] ,WeightMin[[5,8]]) = min([11,15] ,[13,14]) = [11,14]
【P2】在所有已知路径中选出最短路径对应的顶点,归入FinalSet
min{n5,n8} = min{WeightMin[[5,8]]} = min([11,14]) = 11
n5
FinalSet={0,1,2,3,4,6,7,5}
【P1】对上次归入FinalSet的顶点运行【广度优先算法】求所有可见点的距离长度
g(n5) => (n8)
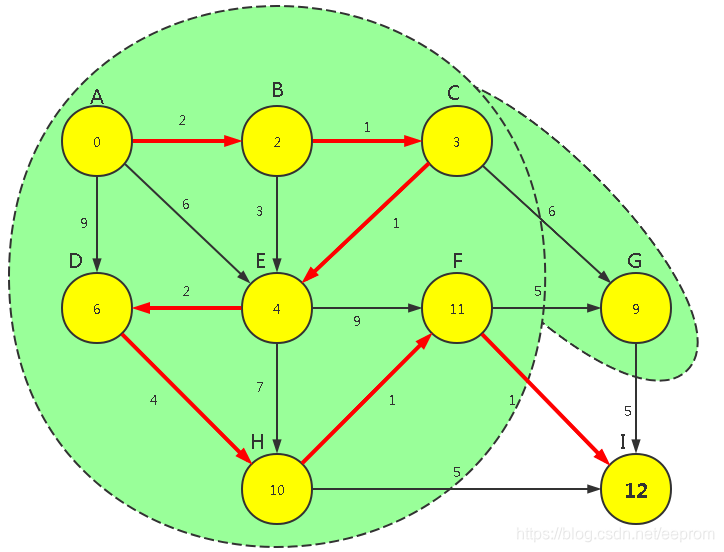
w(n8) = WeightMin[5]+Weight[5,(n8)] = [11+1] = [12]
WeightMin[8] = min([12] ,WeightMin[8]) = min([12] ,[14]) = [12]
【P2】在所有已知路径中选出最短路径对应的顶点,归入FinalSet
min{n8} = min{WeightMin[8]} = min([12]) = 12
n8
FinalSet={0,1,2,3,4,6,7,5,8}
至此,所有顶点都进入FinalSet里
如果觉得我的文章对您有用,请随意打赏。你的支持将鼓励我继续创作!
